韓國智能模型車技術(shù)方案分析
作者:清華大學(xué) 汽車安全與節(jié)能國家重點實驗室 黃開勝 金華民 蔣狄南
時間:2009-06-23
來源:電子產(chǎn)品世界
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
這種方法的特點是用了較少個數(shù)的傳感器進(jìn)行道路識別,而且充分利用MCU里的ADC(Analog to Digital Converter)功能。
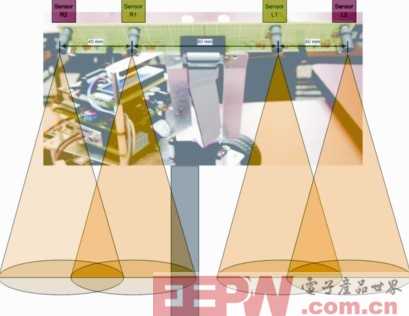
3、采用三個傳感器進(jìn)行線路識別,傳感器放置在伸出車體的小電路板上(見圖5)。安裝在兩邊的傳感器,可以算出偏移量及偏移方向。中間的傳感器主要負(fù)責(zé)判斷智能車是否脫離路線。小電路板可以用一個伺服電機(jī)控制左右輕微擺動來尋線。
轉(zhuǎn)向伺服電機(jī)和驅(qū)動電機(jī)一般采用PID控制,部分設(shè)計僅對驅(qū)動電機(jī)采用PD控制,對伺服電機(jī)采用P控制,也能較好地完成速度和轉(zhuǎn)向的控制。常見的其他控制方法,如模糊控制等,在2004和2005年公開的技術(shù)方案中沒有涉及。
下面簡單介紹驅(qū)動電機(jī)的PID控制算法。
對驅(qū)動電機(jī)的控制,通過下面公式實現(xiàn)。
其中,
、:當(dāng)前和上次操作量
:當(dāng)前操作量微分
、、:當(dāng)前,上次,上上次偏差
、、的數(shù)值通過實驗得到。為了得到與目標(biāo)速度的偏差,要利用電機(jī)解碼器或者其他的轉(zhuǎn)速傳感器測量當(dāng)前驅(qū)動電機(jī)的速度。圖10是PID控制框圖。

伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理











評論