- 據美國物理組織網站報道,近日,美國哈佛大學的工程師最新研制一種汽車差動齒輪百萬分之一大小的新型差動齒輪,可用于控制航空微型機器人的飛行,未來可用于監控環境危害、森林火災和其它對人類帶來威脅的區域。
這項最新技術首次實現微型飛行器被動地平衡空氣動力,使它們的機翼能夠響應風力、機翼損壞和其它實際中遇到的問題。哈佛大學工程和應用科學學院研究生普拉瑟維-斯里薩拉(PratheevS.Sreetharan)是該項研究負責人,他說:“這種新型航空微型機器人的動力傳動系統與兩輪驅動汽車擁有共同的特
- 關鍵字:
電子傳感器 機器人
- 北京時間8月16日消息,據國外媒體報道,外骨骼的本來含意是指動物的外部骨骼,用于支撐或保護內骨骼。經過不...
- 關鍵字:
世界 機器人 外骨骼
- 日本科技公司“賽百達因”(Cyberdyne)研制的HAL-5是一款半機器人,擁有自我拓展和改進功能。它裝有主動控制系...
- 關鍵字:
日本 機器人 HAL-5
- 本文設計了一種基于摩托羅拉MC68HC08系列單片機的機器人追跑控制系統,用于研究機器人之間的簡單互動。
移動機器人行為描述
在此系統中,我們將兩個移動機器人一個命名為“貓”,一個命名為“鼠”。當
- 關鍵字:
控制系統 設計 機器人 單片機 MC68HC08 系列 基于
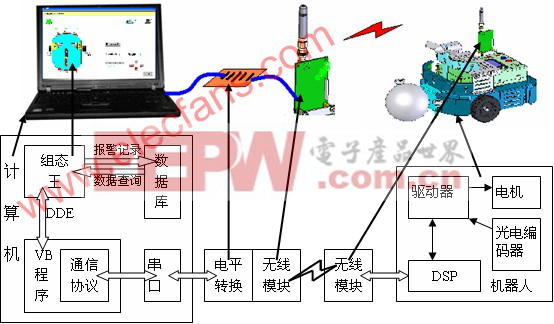
- 本設計的整體結構如圖1所示。 圖1 系統整體結構1.PC機監控軟件的設計(1)首先完成組態王和VB的DDE對話。動態數據交換(DDE)是Windows平臺下的一個完整的通訊協議,它使應用程序間能彼
- 關鍵字:
通訊 組態 監控 串行 無線 滅火 機器人 智能
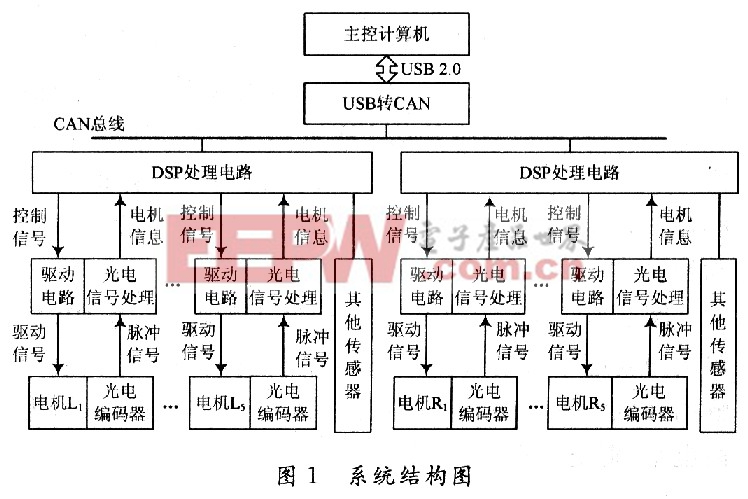
- 在仿人機器人研究領域,雙足步行控制一直是其難點。主要介紹基于TI的DSP芯片TMS320F2812設計雙足機器人的基本運動控制系統,圍繞機器人腿部無刷直流電機的驅動進行優化設計。系統采用PWM進行電機調速,輔助以補償參數,通過步態指令,驗證電機運轉的精確性、穩定性和系統的可操作性。電機調試為CCS仿真、步態規劃和獨立行走提供試驗平臺,使機器人能夠實現步行功能。
- 關鍵字:
控制系統 設計 運動 機器人 DSP 雙足 基于 編解碼器
- 挑戰:創建一個高精度的監督和控制系統,該系統能夠在微創神經外科中,安全地移動機器人。
解決方案:使用NI CompactRIO平臺開發一個安全的、統更合理、更靈活且更可靠的高性能機器人控制系統。
“由于CompactRIO
- 關鍵字:
CompactRIO 硬件平臺 高精度 機器人

- 基于ARM9嵌入式系統智能滅火機器人控制器設計,本文將從硬件和軟件方面講述智能滅火機器人控制器的實現方法,并且給出了機器人滅火的具體實驗,驗證了方案的可行性,為智能滅火機器人的進一步研究提供了平臺。
- 關鍵字:
機器人 控制器 設計 滅火 智能 ARM9 嵌入式 系統 基于 編解碼器
- 引言
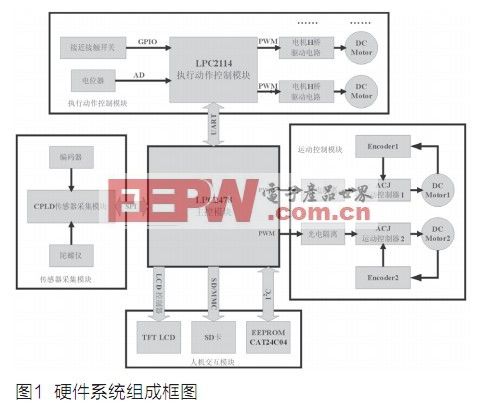
自主移動機器人是指具有行動決策和規劃,以及自動執行能力,集人工智能、智能控制、信息處理、檢測與轉換等專業技術為一體的系統。一般移動機器人都是基于行為的,機器人只有到達指定位置才開始執行其他動作,因此導航和定位是移動機器人研究的重要問題。本文采用陀螺儀和光電編碼器的慣性導航方式,并且采用LPC2478構建整個控制系統,并在一臺機器人上得以實現。
本設計的輪式自動機器人的控制系統主要分為主控模塊、傳感器采集模塊、運動控制模塊、執行動作控制模塊和人機交互模塊五個部分。傳感器采集處理模塊主要
- 關鍵字:
機器人 傳感器 智能控制 LPC2478
“機器人”介紹
您好,目前還沒有人創建詞條“機器人”!
歡迎您創建該詞條,闡述對“機器人”的理解,并與今后在此搜索“機器人”的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473



