輸電線路上的實際暫態行波波頭總是存在一定的上升時間,這使得故障初始行波浪涌到達線路兩端測量點的時刻難以被準確標定,從而導致現有的雙端行波故障測距方法存在不可避免的測距誤差。本文在分析D型雙端現代行波故障
關鍵字:
故障 原理 分析 應用 實測 及其 現代 測距
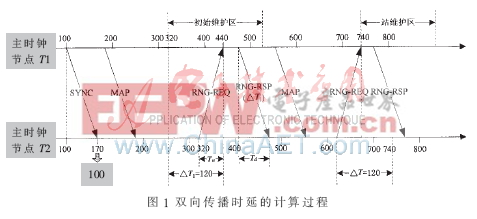
Ad hoc網絡是一種特殊的無線移動通信系統,具有無中心、多跳等特點。結合無線傳感器網絡時鐘同步協議RBS、TPSN和有線網絡DOCSIS協議,提出了一種適合Ad hoc網絡的時鐘同步協議。先在Ad hoc網絡上建立具有層次性的全網絡結構后,以發送廣播時鐘同步信號的方式實現全網絡節點的時鐘相對同步,并通過周期性和突發性的雙向測距實現和維護主從時鐘節點之間精確的時間同步,以滿足實際應用的要求。仿真實驗表明,該時鐘同步協議能滿足不同時鐘同步精度要求下的Ad hoc網絡應用,具有低功耗和高可靠性的特點。 關鍵字:
時鐘 同步 協議 測距 網絡 Ad hoc 基于 通信協議
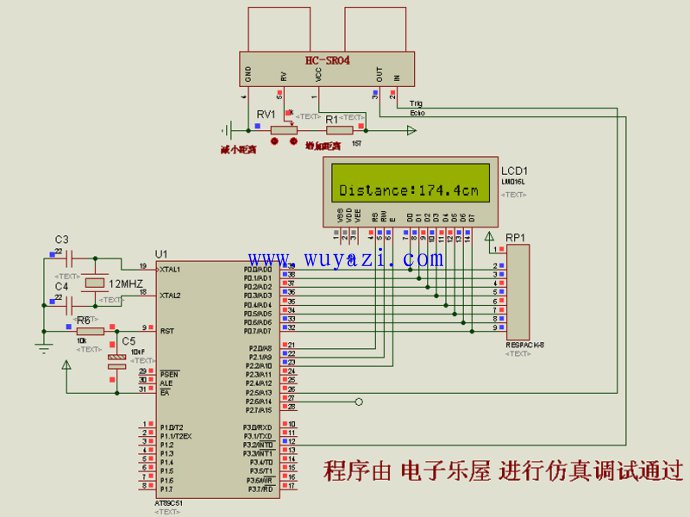
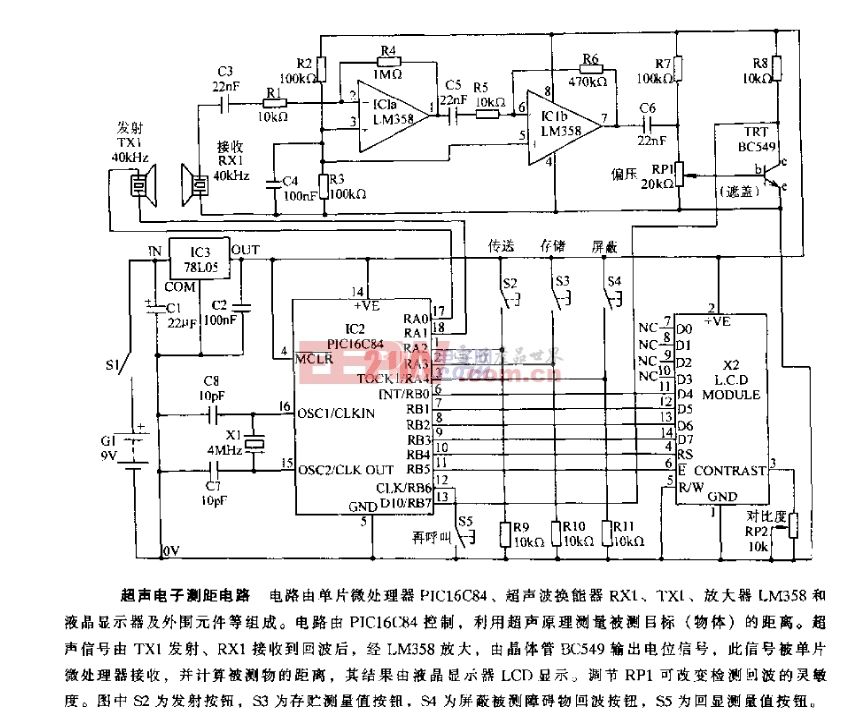
基于單片機的超聲波測距儀的主要硬件電路本文簡要介紹了基于單片機的超聲波測距儀的主要硬件電路。 隨著檢測技術研究的不斷深入,對超聲檢測儀器的功能要求越來越高,單數碼顯示的超聲檢測儀測讀會帶來較大的測試誤差
關鍵字:
硬件 電路 主要 測距 單片機 超聲波 基于
[摘要] 隨著檢測技術研究的不斷深入,對超聲檢測儀器的功能要求越來越高,單數碼顯示的超聲檢測儀測讀會帶來較大的測試誤差。進一步要求以后生產的超聲儀能夠具有雙顯及內帶有單板機的微處理功能。本文簡要介紹了基于
關鍵字:
測距 超聲波 單片機 基于
摘要:本設計主要是基于AT89S51芯片為核心的超聲波測距儀,并有超聲波處理模塊CX20106A、CD4069組成的超聲波發射電路、數碼管顯示等器件組成,包括單片機系統、超聲波發射電路、超聲波接收電路、單片機復位電路、LED
關鍵字:
測距 超聲波 單片機 基于
摘要:利用AT89C52單片機作為主控制器,結合超聲波測距原理,實現倒車防撞報警功能。進行系統硬件和軟件的設計,檢波接收電路和溫度補償電路分別采用了CX20106A和DSl8820兩款集成芯片,減小了電路間的相互干擾,提高
關鍵字:
防撞 報警系統 倒車 測距 超聲波 AT89C52
O 引言
關鍵字:
設計 系統 測距 超聲波 超聲波 測距 單片機
介紹一種以Philips公司的P87C591作為超聲波傳感器控制核心及CAN總線控制器,以TJAl040作為CAN總線收發器的CAN總線智能超聲波測距系統;詳細介紹其硬件電路構成、工作原理及軟件設計思想。該系統硬件結構簡單,實用性強。
關鍵字:
測距 系統 設計 超聲 總線 P87C591 CAN 基于 單片機 CAN
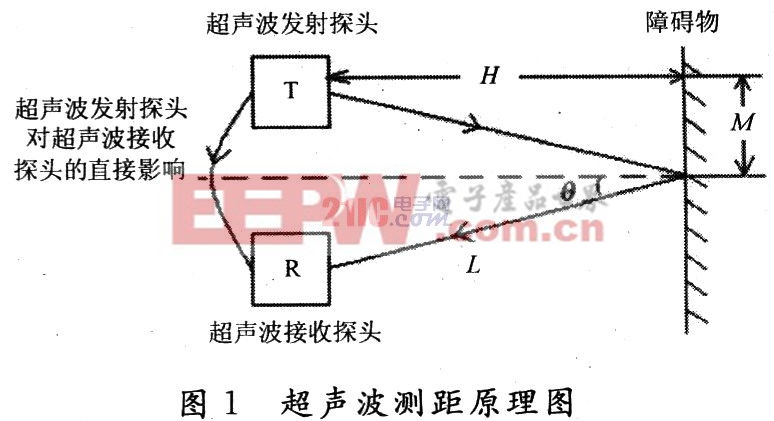
本課題研究的機器人工作在大約40 m深的漿液下,為了防止水煤漿由于長時間的存貯而沉淀,他能在按照預先規劃的軌跡行走時完成攪拌功能。在這種條件下,一個很重要的問題就是機器人定位功能的實現,用來實時了解其具體位置。本機器人定位系統采用多路超聲波傳感器測距,然后采用三點定位法,把測距信息轉化為機器人的位置信息。超聲波作為一種無接觸檢測方式,與激光、紅外以及無線電測距相比,在水煤漿中可以比較容易地穿透水煤漿達到測距的目的,且精度較高。
l 超聲波測距系統
1.1 超聲波測距原理
超聲波測距原
關鍵字:
單片機 機器人 測距 超聲波
0 引言
隨著我國航天技術的不斷進步,深空測距技術受到越來越多的關注。在深空測距系統中,中頻信號發生器對系統性能有著重要的意義。在USB(統一S頻段)系統中,原有的模擬電路實現的發射模塊存在性能不完善、輸入動態范圍小、可控性能差、不能適應中心頻率大范圍變化、體積大等問題,為了解決上述問題,可在一個標準化通用數字調制信號發生器的平臺上,通過外圍的控制電路,實現對載波中心頻率、輸出功率、調相指數、測距音通/斷控制等參數的改變。
以軟件無線電思想為核心,基于PLD(可編程邏輯器件)的通用調制信號
關鍵字:
測距 模擬電路 USB 無線電 FPGA
本文給出了一種基于FPGA和AD9957的側音測距信號發生器設計,設計過程中充分利用了FPGA中特有的IP CORE來實現設計中所需的DDS、乘法器、加法器及查找表的功能,這樣不僅簡化了實現程序,而且節省了資源。同時通過外圍控制模塊的設計,實現了靈活的參數可控性能。
關鍵字:
信號發生器 設計 測距 USB AD9957 基于
0 引言
隨著我國航天技術的不斷進步,深空測距技術受到越來越多的關注。在深空測距系統中,中頻信號發生器對系統性能有著重要的意義。在USB(統一S頻段)系統中,原有的模擬電路實現的發射模塊存在性能不完善、輸入動態范圍小、可控性能差、不能適應中心頻率大范圍變化、體積大等問題,為了解決上述問題,可在一個標準化通用數字調制信號發生器的平臺上,通過外圍的控制電路,實現對載波中心頻率、輸出功率、調相指數、測距音通/斷控制等參數的改變。
以軟件無線電思想為核心,基于PLD(可編程邏輯器件)的通用調制信號
關鍵字:
測距 PLD USB D/A FPGA
測距介紹
您好,目前還沒有人創建詞條測距!
歡迎您創建該詞條,闡述對測距的理解,并與今后在此搜索測距的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473