can&485 文章 最新資訊
適合充電樁總線隔離,隔離電壓達(dá)到5000V的高速光耦
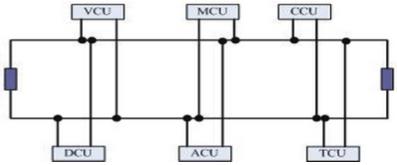
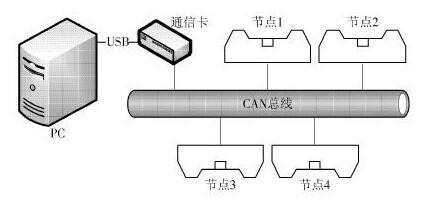
- 電動汽車產(chǎn)業(yè)在新能源背景下蓄勢待發(fā),而充電樁、充電站的建設(shè)和管理影響著整個電動汽車的產(chǎn)業(yè)發(fā)展,是汽車商業(yè)化、產(chǎn)業(yè)化過程中的重要環(huán)節(jié)。充電樁實(shí)現(xiàn)對動力電池的快速、高效、安全、合理的電量補(bǔ)給以及更加人性化的設(shè)計(jì)是充電樁設(shè)計(jì)的基本原則要求。 目前充電樁主要涉及到的控制管理單元包括:主控單元、電壓控制單元、電流控制單元、溫度控制單元、顯示控制單元、電池控制單元、打印控制單元。作為《電動汽車充電系統(tǒng)技術(shù)規(guī)范》認(rèn)定的標(biāo)準(zhǔn)充電控制網(wǎng)絡(luò)CAN-bus把各個控制單元連接起來,工作原理是:各個控制單元完成主控電壓、
- 關(guān)鍵字: 光耦 CAN
如何評測CAN波形抖動是否違規(guī)?

- 摘要:總線通訊系統(tǒng)中,每個節(jié)點(diǎn)的信號質(zhì)量都直接影響了整個總線的通訊質(zhì)量,所有保證每個節(jié)點(diǎn)都具備高度一致的信號質(zhì)量便顯得至關(guān)重要,該文將為大家細(xì)細(xì)道來,如果做好信號特征的好壞評估。 CAN總線設(shè)計(jì)規(guī)范對于CAN節(jié)點(diǎn)的差分電平位信號特征著嚴(yán)格的規(guī)定,如果節(jié)點(diǎn)的差分電平位信號特征不符合規(guī)范,則在現(xiàn)場組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點(diǎn)間出現(xiàn)通信故障。具體要求如表 1所示,為測試標(biāo)準(zhǔn)“GMW3122信號特征標(biāo)準(zhǔn)”。 表 1 GMW3122信號特
- 關(guān)鍵字: CAN CANScope
如何確定CAN通信節(jié)點(diǎn)的波特率容忍度?
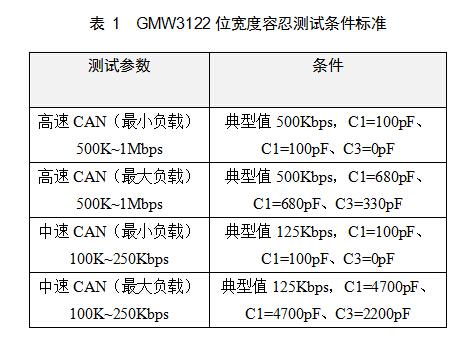
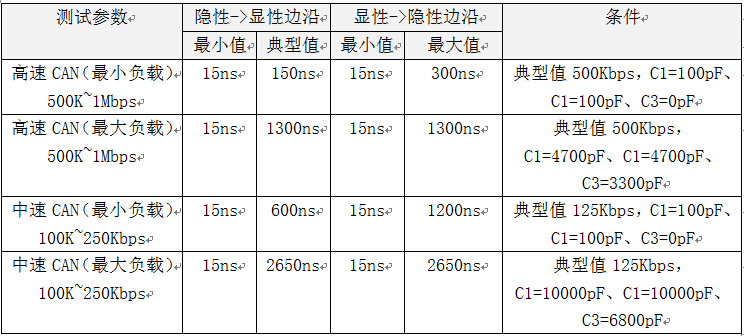
- 汽車CAN總線設(shè)計(jì)規(guī)范對于CAN節(jié)點(diǎn)的波特率容忍度有著嚴(yán)格的規(guī)定,每個節(jié)點(diǎn)都必須具備一定的波特率容忍度,才能使節(jié)點(diǎn)組合到一起后,實(shí)現(xiàn)較好的通信性能,不至于很容易就出現(xiàn)總線通訊不正常,通訊錯誤增加。具體如表 1為汽車測試標(biāo)準(zhǔn)GMW3122位寬度容忍測試條件標(biāo)準(zhǔn) 在表1所示的四種條件下,選擇被測DUT的適應(yīng)條件。使用如表 2所示的報文對DUT進(jìn)行發(fā)送,不出現(xiàn)錯誤幀則表示通過。 表2 測試報文 所以每個廠家在產(chǎn)品加入現(xiàn)場的總線之前都需
- 關(guān)鍵字: CAN 波特率
如何進(jìn)行CAN節(jié)點(diǎn)信號特征測試
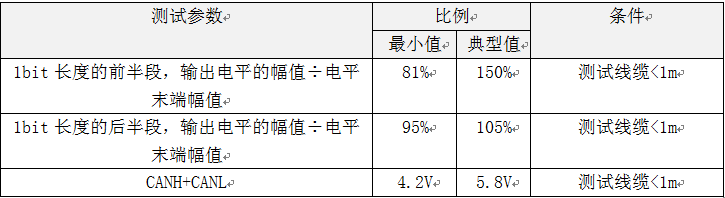
- 摘要:總線通訊系統(tǒng)中,每個節(jié)點(diǎn)的信號質(zhì)量都直接影響了整個總線的通訊質(zhì)量,所有保證每個節(jié)點(diǎn)都具備高度一致的信號質(zhì)量便顯得至關(guān)重要,該文將為大家細(xì)細(xì)道來,如果做好信號特征的好壞評估。 CAN總線設(shè)計(jì)規(guī)范對于CAN節(jié)點(diǎn)的差分電平位信號特征著嚴(yán)格的規(guī)定,如果節(jié)點(diǎn)的差分電平位信號特征不符合規(guī)范,則在現(xiàn)場組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點(diǎn)間出現(xiàn)通信故障。具體要求如表 1所示,為測試標(biāo)準(zhǔn)“GMW3122信號特征標(biāo)準(zhǔn)”。 表 1 GMW3122信號特征標(biāo)準(zhǔn) 在以往的測
- 關(guān)鍵字: CAN
總想說點(diǎn)兒讓人拍案叫絕的設(shè)計(jì)
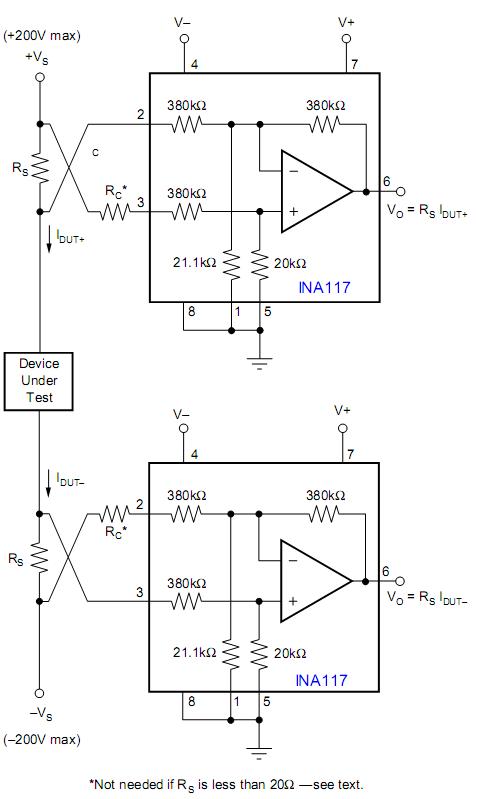
- 我一直不喜歡那些盲目崇拜老外的人,但有時還不得不對行業(yè)內(nèi)的老外,佩服得五體投地。他們也會出錯,寫出一些亂七八糟的文章害人,但是確實(shí)有好多設(shè)計(jì),實(shí)在精妙,讓人拍案叫絕。 前些日子看CAN總線,那么多設(shè)備掛接在單信息總線上,都想說話,還沒有領(lǐng)導(dǎo),那不成一鍋粥了嗎?看懂就發(fā)現(xiàn),原來它們給每個接入設(shè)備分配了ID號——有大小區(qū)分的身份證,靠二進(jìn)制的01級別展開無限制的競爭,一下就實(shí)現(xiàn)了多個設(shè)備無領(lǐng)導(dǎo)情況下的單總線競爭占用。看完后,我的感覺是美妙。這些洋鬼子,看來是聰明的,至少不比我
- 關(guān)鍵字: CAN AD629
如何用手機(jī)實(shí)現(xiàn)CAN網(wǎng)絡(luò)的監(jiān)控
- 摘要:目前,物聯(lián)網(wǎng)的概念已經(jīng)風(fēng)靡全球,各行各業(yè)都在想盡一切的辦法做創(chuàng)新,為的就是給現(xiàn)有的產(chǎn)品注入新鮮的血液,讓其煥發(fā)曾經(jīng)的輝煌。CAN轉(zhuǎn)WiFi設(shè)備的現(xiàn)世,打破以往線纜的傳輸,讓現(xiàn)場總線通信實(shí)現(xiàn)無線聯(lián)網(wǎng),甚至步入手機(jī)APP監(jiān)控時代。 如今汽車已成為人類生活中最主要的交通工具,看著道路上那擁堵的情況,若你也已置身其中,那確實(shí)是一件苦惱的事情,為了解決這問題,各大廠家各顯奇招,都嘗試著用自己的概念去實(shí)現(xiàn)汽車物聯(lián)網(wǎng),例如:阿里巴巴聯(lián)手上汽集團(tuán),將阿里系的互聯(lián)網(wǎng)生態(tài)覆蓋到智能汽車領(lǐng)域,樂視聯(lián)手北汽集
- 關(guān)鍵字: 物聯(lián)網(wǎng) CAN
教你輕松替代RS 232:RS 485實(shí)現(xiàn)串口通信
- ARM(Advanced RISC Machines)是對一類微處理器的通稱。ARM是微處理器行業(yè)的一家知名企業(yè),它設(shè)計(jì)了大量高性能、廉價、耗能低的RISC處理器、相關(guān)技術(shù)及軟件。ARM微處理器是一種高性能、低功耗的32位微處理器,該處理器廣泛應(yīng)用于嵌入式系統(tǒng)中。ARM 9代表了ARM公司主流的處理器,已經(jīng)在手持電話、機(jī)頂盒、數(shù)碼相機(jī)、GPS、個人數(shù)字助理以及因特網(wǎng)設(shè)備等方面有了廣泛的應(yīng)用。在此,以ST公司生產(chǎn)的ARM 9系列中典型的STR912FW44X6芯片作為硬件開發(fā)平臺的MCU,完成了基于AR
- 關(guān)鍵字: RS 232 RS 485
如何準(zhǔn)確測量CAN節(jié)點(diǎn)的Busoff恢復(fù)時間

- 通信出現(xiàn)故障是時常會遇到的事情,小則無傷大雅,大可殃及城池。因此,處理故障的方法便顯得至關(guān)重要,確認(rèn)處理方式是否能可靠運(yùn)作更是重中之重。 當(dāng)CAN通信出現(xiàn)故障時,CAN控制器會讓故障節(jié)點(diǎn)從主動錯誤狀態(tài)進(jìn)入被動錯誤狀態(tài),甚至進(jìn)入總線關(guān)閉(Busoff)狀態(tài),使故障節(jié)點(diǎn)脫離總線的通信,使其不影響正常節(jié)點(diǎn)的通信,但該控制方案將導(dǎo)致在系統(tǒng)重新上電之前,進(jìn)入總線關(guān)閉狀態(tài)的節(jié)點(diǎn)會持續(xù)無法與其他節(jié)點(diǎn)做數(shù)據(jù)的交互,如若節(jié)點(diǎn)只是暫時的故障,那讓節(jié)點(diǎn)實(shí)現(xiàn)自恢復(fù)的功能,則是更為上乘的控制方法。所以CAN總線設(shè)計(jì)規(guī)范對
- 關(guān)鍵字: CAN Busoff
基于RS-485總線的遠(yuǎn)程測控系統(tǒng)
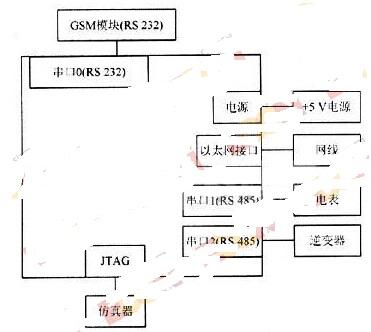
- RS-485總線型遠(yuǎn)程測控系統(tǒng)已得到廣泛應(yīng)用,這主要因?yàn)镽S-485總線具有傳輸距離遠(yuǎn)等特點(diǎn)。在傳輸速率為9600bit/s時傳輸距離可達(dá)1.2km以上,最高傳輸速率可達(dá)10Mbit/s,且只用普通雙絞線即可,同一對雙絞線上可以掛接多至256個以上的終端。有許多工業(yè)測控模塊都是采用RS-485總線型的,比如Adam、Nudan等,但價格較高。本文介紹的RS-485遠(yuǎn)程測控系統(tǒng)結(jié)合傳統(tǒng)的分布式測控系統(tǒng)的特點(diǎn)、利用了RS-485總線的特點(diǎn),而且巧妙地應(yīng)用了AT89C2051單片機(jī)和CD4067多路開關(guān),因
- 關(guān)鍵字: RS-485 AT89C2051
如何準(zhǔn)確測量CAN節(jié)點(diǎn)的信號邊沿參數(shù)
- CAN總線設(shè)計(jì)規(guī)范對于CAN節(jié)點(diǎn)的信號邊沿各項(xiàng)參數(shù)都有著嚴(yán)格的規(guī)定,如果不符合規(guī)范,則在現(xiàn)場組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點(diǎn)間出現(xiàn)通信故障。具體要求如表 1所示,為測試標(biāo)準(zhǔn)“GMW3122信號邊沿標(biāo)準(zhǔn)”。 表 1 GMW3122信號邊沿標(biāo)準(zhǔn) 所以每個廠家在產(chǎn)品投入使用前,都要進(jìn)行CAN節(jié)點(diǎn)DUT(被測設(shè)備)的信號邊沿參數(shù)測試。一般是使用GMW3122信號邊沿測試的CAN測試方法,如下描述: 如圖 1所示,我們以信號跳變過程的20% ~ 80%定義為該
- 關(guān)鍵字: CAN DUT
CAN FD,汽車電子下一個“風(fēng)口”
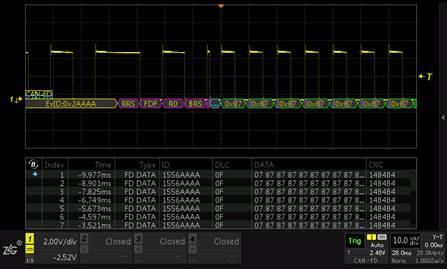
- 隨著電動汽車,無人駕駛汽車技術(shù)的快速發(fā)展,以及對汽車高級駕駛輔助系統(tǒng)和人機(jī)交互的增加,傳統(tǒng)的CAN總線在傳輸速率和帶寬等方面越來越顯得力不從心,CAN FD應(yīng)運(yùn)而生,無疑將是下一個工業(yè)行業(yè)風(fēng)口。 隨著電動汽車,無人駕駛汽車技術(shù)的快速發(fā)展,以及對汽車高級駕駛輔助系統(tǒng)和人機(jī)交互的增加,傳統(tǒng)的CAN總線在傳輸速率和帶寬等方面越來越顯得力不從心,因此改進(jìn)版的CAN總線應(yīng)運(yùn)而生。從2012年第13屆ICC大會上發(fā)布,到2015年提交國際標(biāo)準(zhǔn)化ISO 11898系列,CAN FD(CAN with Flex
- 關(guān)鍵字: CAN 示波器
基于CAN總線的在線更新機(jī)制的設(shè)計(jì)實(shí)現(xiàn)
- 0引言 分散型控制系統(tǒng)中的現(xiàn)場終端一般由控制器和各檢測模塊構(gòu)成,它們之間通過一定的通信網(wǎng)絡(luò)建立數(shù)據(jù)的交換鏈路。這種系統(tǒng)具有高可靠、開放性、靈活性、協(xié)調(diào)性、易維護(hù)等優(yōu)點(diǎn)。然而,該分散型系統(tǒng)也具有終端數(shù)量多、分布范圍廣的特點(diǎn)。一旦終端系統(tǒng)軟件存在缺陷或用戶提出新的功能和指標(biāo)要求時,其升級、維護(hù)的工作量和成本都非常大。本文針對上述情況,設(shè)計(jì)了一種方便、靈活、快速及穩(wěn)定地對MCU節(jié)點(diǎn)進(jìn)行在線更新的機(jī)制。基于LPC11C24微控制器組成的CAN網(wǎng)絡(luò),采用IAP編程技術(shù)(In Application Pro
- 關(guān)鍵字: CAN LPC11C24
如何準(zhǔn)確測量CAN節(jié)點(diǎn)的輸入電壓閾值
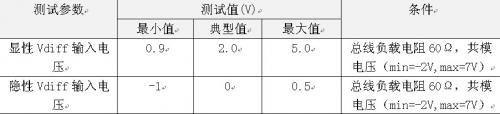
- CAN總線設(shè)計(jì)規(guī)范對于CAN節(jié)點(diǎn)的輸入電壓閾值有著嚴(yán)格的規(guī)定,如果節(jié)點(diǎn)的輸入電壓閾值不符合規(guī)范,則在現(xiàn)場組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點(diǎn)間出現(xiàn)通信故障。具體要求如表1所示,為測試標(biāo)準(zhǔn)“ISO 11898-2輸出電壓標(biāo)準(zhǔn)”。 表 1 ISO 11898-2輸入電壓閾值標(biāo)準(zhǔn) 所以每個廠家在產(chǎn)品投入使用前,都要進(jìn)行CAN節(jié)點(diǎn)DUT(被測設(shè)備)的輸入電壓閾值測試。一般是使用ISO 11989-2輸入電壓閾值標(biāo)準(zhǔn)的CAN測試方法,如下描述:
- 關(guān)鍵字: CAN 示波器
can&485介紹
您好,目前還沒有人創(chuàng)建詞條can&485!
歡迎您創(chuàng)建該詞條,闡述對can&485的理解,并與今后在此搜索can&485的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對can&485的理解,并與今后在此搜索can&485的朋友們分享。 創(chuàng)建詞條
can&485電路

can&485相關(guān)帖子
can&485資料下載
can&485專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司