Cyber15隊智能汽車競賽技術報告(節選)

目標是達到圖5效果。紅色為卡爾曼濾波輸出,藍色為加速度計直接輸出。如果紅色抖動非常厲害,可以適當減小Kg的大小。接著是動態整定,還是保持車輪恒定PWM旋轉,同時,搖擺車身。
本文引用地址:http://cqxgywz.com/article/140283.htm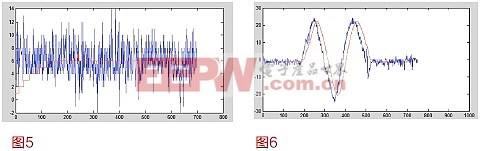
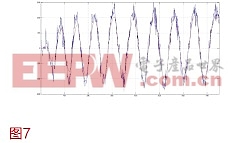
大致調節到圖6所示的樣子。目前存在一個相位差,這個相位差在后期直立算法的調試中是致命的,必須克服掉。解決方法,逐漸增加dt即可。達到圖7效果即可認為卡爾曼濾波參數整定完成。
電磁支架設計
在智能車設計中,越早獲取賽道信息就能夠更早作出判斷,并對車模實施控制。對于攝像頭組而言,獲取的賽道信息多,但是對于電磁探頭而言,基本只能獲得探頭正下方和前方部分信息。那么要越早獲取前方賽道信息,最直接有效的方法就是加長前瞻。
同時,針對兩輪車而言,長前瞻容易帶來如下幾個問題。
1、增加重量:支架的重量將直接影響直立的效果以及兩輪車的動態性能。尤其當前瞻較遠的時候,前段的增重將造成力矩的增加,且前瞻越遠,增加的力矩也就更明顯,對于車模的直立影響將更大。
2、增加轉向慣量:過于長的前瞻將使得Z方向的轉動慣量增加,由于電機功率有限,轉動慣量的增加將造成轉向上不靈活的情況,影響彎道性能。

3、信號串擾:根據比賽規定,兩條電磁線間最小間距為60CM,如果前瞻過長,有可能探頭支架申入臨近賽道,被臨近信號干擾,造成竄道的情況。
4、過于壓線:當使用跟線的彎道算法時,過長的前瞻容易致使一個輪子掉落跑道,如下圖。

根據實際測驗得,前瞻在40CM-60CM之間,效果最好,因此最后選取前瞻為50CM。
參考文獻
[1]馮智勇,曾瀚,張力,趙亦欣,黃偉.基于陀螺儀及加速度計信號融合的姿態角度測量[J].西南師范大學學報,2011,36(4):137-141
[2]陸芳,劉俊.卡爾曼濾波在陀螺儀隨機漂移中的應用[J]. 微計算機信息,2007,23(8-2):222-224
[3]陳靜.兩輪自平衡機器人模型及控制方法研究[D].北京工業大學碩士學位論文,2008.
[4]Rich Chi Ooi.Balancing a Two-Wheeled Autonomous Robot[D].The University of Western Australia Final Year Thesis,2003.
[5]Gene F.Franklin,J.David Powell,Michael L.Workman.Digital Control of Dynamic Systems[M].北京:清華大學出社,2011.












評論