基于遺傳算法的足球機器人路徑規劃

摘要:足球機器人系統是一個智能型系統,并且處于一個具有實時對抗性的動態的復雜環境系統中。路徑規劃層是機器人決策系統的核心之一。本文研究了足球機器人系統的運動學原理,討論了遺傳算法在足球機器人路徑規劃中的應用,使機器人能避開障礙物從給定點到目標點找到一條比較短的路徑,進行仿真實驗,比較了不同遺傳代數對路徑規劃的影響。
本文引用地址:http://cqxgywz.com/article/142703.htm引言
機器人足球比賽近年來在全世界廣泛盛行,其中足球機器人的路徑規劃問題也成為當下學術界的研究熱點。遺傳算法由于其自身的智能性搜索、強魯棒性和內在并行性等特點,在路徑規劃、自動控制和模式識別等領域得到廣泛應用。
足球機器人系統
足球機器人子系統
對足球機器人進行路徑規劃主要達成兩個目標:一是為了完成某項動作,二是為了避障以實現安全的運行。足球機器人的路徑規劃具有復雜性、隨機性、多目標和多約束等特點。足球機器人系統由以下幾個部分組成:
1)機器人小車子系統:由多個機器人小車組成;
2)視覺子系統:由攝像機、圖像識別系統組成;
3)通訊子系統:由無線電發射板組成;
4)決策子系統。
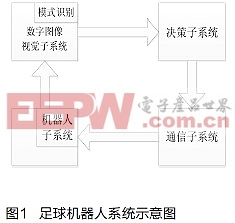
足球機器人系統如圖1所示,首先由視覺子系統進行場景識別,然后傳遞給決策子系統處理,再通過通訊子系統發出指令,最后足球機器人完成動作。
決策系統為仿真足球機器人系統的核心,主要分為四部分:
1) 信息處理層:接受外部信息進行處理,轉換坐標信息;
2) 分區決策層:進行場地分區,確定機器人隊形和分配角色;
3) 路徑規劃層:路徑規劃層接收到上一層分區決策層所傳遞的信息,本層的主要任務是對機器人完成任務所需的運動軌跡進行規劃,因此足球機器人是否能夠順利地完成任務是本層的關鍵,也是決策系統的關鍵;
4) 運動層:執行該機器人所分配的任務。




評論