基于北斗二代系統的嵌入式船用導航儀硬件設計

2.2 北斗基帶芯片處理模塊及電路
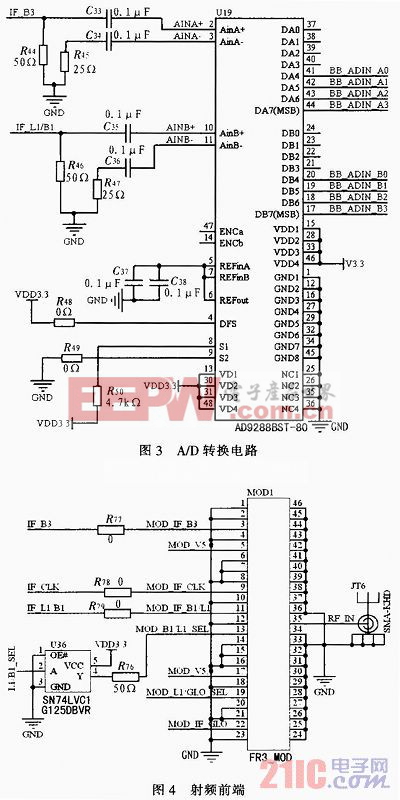
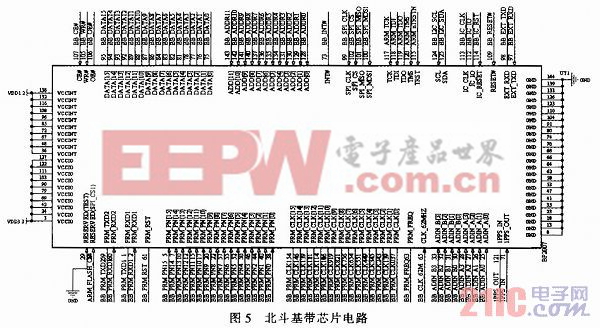
北斗基帶芯片采用的是HwaNavchip-1芯片,可快速捕獲北斗系統B1和B3頻點的精密測距碼和北斗/GPS衛星的普通測距碼,具有較快的捕獲速度、極高的動態跟蹤范圍和測量精度,通過串口輸出標準的二進制或NMEA-0183格式的信號,數據被傳送到解析程序進行驗證處理,計算出位置信息,并在液晶顯示器上進行顯示。這部分電路的主要工作原理和過程是將射頻信號經過下變頻成為模擬中頻信號再通過A/D轉換得到導航信號,這些信號經過基帶處理模塊和導航信息處理模塊捕獲、跟蹤、解算得到輸出的導航信息。A/D轉換和射頻前端電路分別如圖3、4所示,北斗基帶芯片部分電路如圖5所示。本文引用地址:http://cqxgywz.com/article/148861.htm







評論