基于AR嘞CAN總線的嵌入式PLC設計

3.1下位機軟件設計
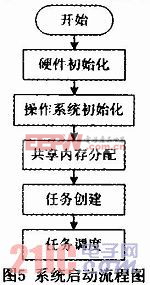
系統下位機軟件采用模塊化的設計方法,把整個系統分解為幾個功能相對獨立的比較小的程序模塊,分別對實現各個功能的程序模塊進行設計、編程和調試。根據不同模塊在系統中的作用,嵌入式操作系統應實現多個不同優先級的控制任務。這些任務按照優先級從高到低分別為:接收計算機控制中心命令;采集和處理數據;發送數據到本地控制中心。系統啟動流程圖如圖5所示。本文引用地址:http://cqxgywz.com/article/149655.htm
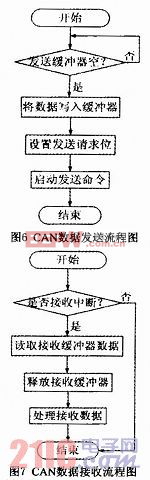
CAN總線通信程序主要由三部分組成:初始化、發送數據、接收數據。CAN控制器的初始化流程是:首先將ARM中CAN控制器相關的引腳使能,然后對CAN控制器進行復位操作,設置CAN總線的通信波特率,最后初始化CAN控制器的工作模式。初始化之后便可以進行數據的發送與接收。CAN數據發送是將采集到的數據打包成符合CAN發送幀格式后,調用CAN發送數據函數進行發送。數據接收程序是從接收緩沖器讀出數據,同時釋放接收緩沖器并對數據做出相應處理,本系統中CAN總線數據接收程序采用中斷法進行控制。數據發送和接收流程圖如圖6、圖7所示。
3.2 上位機軟件設計
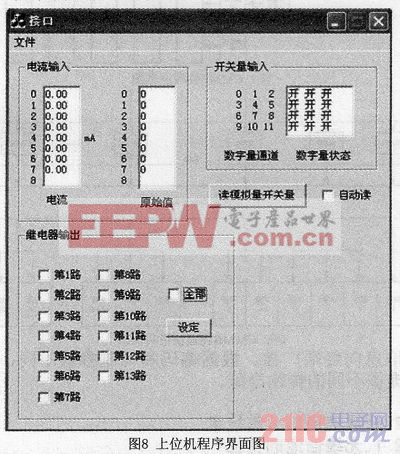
上位機主要實現CAN總線通信、顯示輸入輸出端口的狀態等功能,可以接收下位機傳輸過來的數據,也可以發送命令控制下位機的輸出。采用VC++6.0開發環境的MFC編程實現上位機界面編程及與嵌入式PLC之間的通信。實現界面如圖8所示。
本文給出了基于ARM和CAN總線的嵌入式PLC系統的軟硬件設計方法,實現了對12路開入量信號采集;13路開出量輸出信號的控制;8路模擬量的采集。具有LED指示開關量狀態、遠程監控的功能。采用高性能嵌入式微處理器和嵌入式實時操作系統為核心,并使用穩定的工業現場總線,保證了系統的可靠性和實時性,達到了預期的設計要求。







評論