基于ARM的毫米波天線自動對準平臺系統設計

運行時有兩種狀態:
( 1) 靜止狀態
首先系統啟動之后,進行初始化,然后等待磁羅盤接收信號有效,否則不能進入電機控制任務。在自動運行狀態,此時平臺處于靜止狀態,程序對接收到的串口數據進行計算處理后實時更新,并不停地向顯示控制單元匯報天線與目標指向的夾角大小。
( 2) 運動狀態
當有按鍵按下,顯示控制單元通過中斷的方式對其進行處理,然后通過CAN 總線向平臺控制板發送控制命令。平臺控制板根據控制命令確定轉動方向并在轉動過程中實時監測是否碰到限位開關。
優先級的劃分如下:TaskPortScan 優先級最高,因為平臺的對準可能會順時針或者逆時針連續轉動,而限位開關能夠使平臺往某個方向的轉動累計不超過一圈,以免引起平臺內線的纏繞甚至扯斷。因此當平臺轉動碰到限位開關時,優先級最高,以實時響應斷電,并使平臺反轉,這里通過查詢方式來檢測是否碰到限位開關。
然后就是任務TaskUART0Recv,在轉動過程中都需要實時用到航向和俯仰等角度信息,因此實時準確地接收到此類信息顯得非常重要。因為TaskCAN 用于接收顯示控制單元的控制命令,排在任務TaskUART0Recv后面。角度計算任務的優先級排在任務TaskCAN 的后面,根據任務TaskU ART 0Recv 傳下來的角度原始數據以及其他相關信息,實時計算角度值,以確定平臺轉動的目標位置。雖然TaskMotorCtl 步進電機的控制任務重要,但是幾乎全天候運行,如果優先級較高,會占用很多資源,導致其他任務無法進行,所以將其優先級排在靠后。最后是TaskUART1Recv 任務,因為一般本方位置在實際對準中不會變化,所以其經緯度數據只需接收一次,其優先級排在最后。
3. 3 應用程序流程
利用LPC2294 系列的帶操作系統的專用工程模板可大大減輕編程負擔。模板包括LPC2294 系列微控制器的啟動文件、頭文件、分散加載描述文件等,利用這些文件,應用程序的編寫就變得非常簡單。應用程序流程如圖5 所示。
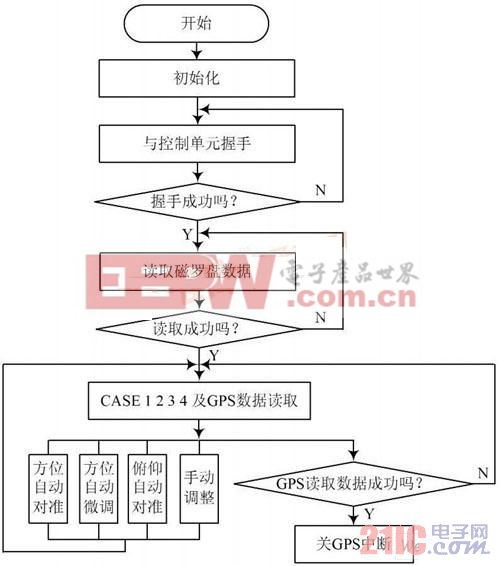
圖5 應用程序流程圖
步進電機穩定工作時測得的控制脈沖信號波形如圖6 所示。
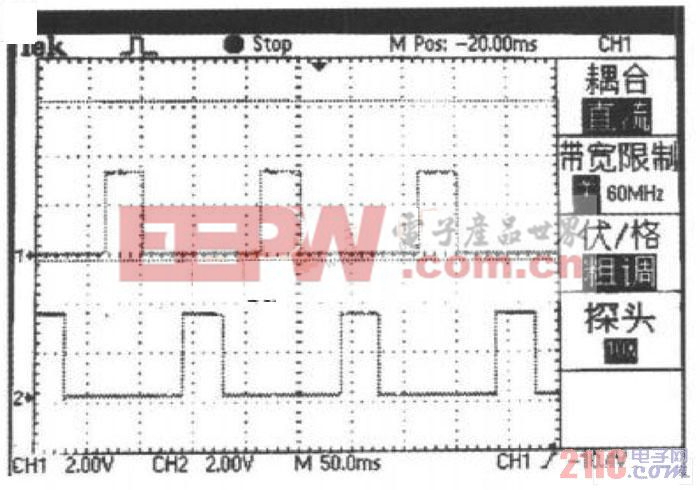
圖6 示波器輸出波形
4 結 語
根據毫米波通信設備的特點,創造性地設計了一個以毫米波天線自動對準平臺系統為應用目標的基于ARM 微處理器LPC2294 的嵌入式實時控制系統。應用ARM 處理器豐富的片內外設和優越的性能提高了平臺系統的對準精度和響應時間,利用 uC/ OS-Ⅱ提高系統的安全性和可靠性,簡化多任務程序的設計。本自動對準平臺系統已經應用于毫米波通信設備的樣機對通通信中,進行了多次外場試驗驗證,系統運轉平穩,對準精度高,架設時間短,從而大大縮短了毫米波通信設備的對準時間,獲得用戶的好*。










評論