飛機剎車模糊神經網絡DSP嵌入式控制系統

飛機剎車系統是飛機上具有相對獨立功能的子系統,承受飛機的動、靜態載荷及著陸時的動能,實現飛機的制動控制。
本文引用地址:http://cqxgywz.com/article/152563.htm從20世紀40年代至今,飛機剎車系統已發展到第四代。第一代飛機剎車系統由離合開關調節壓力來實現剎車控制;第二代用固定參考減速度為誤差門限進行控制;1967年Hydro-Aire公司的第三代飛機剎車系統,以一定的滑移率為誤差門限進行控制;20世紀70年代后,第四代系統用指令傳感器代替液壓閥,采用微處理器,將控制算法通過編程來實現。近年來,國外已著手運用最新控制理論――模糊控制和神經網絡理論研究新一代防滑剎車系統,并成功地利用DC-9飛機的參數進行了仿真。結果表明:新系統具有更高的剎車效率、更好的控制魯棒性。我們也已開始了相應的研究,并成功地進行了軟件仿真,本系統在文獻[5]的基礎上,在硬件上實現了神經網絡和模糊控制,較大程度地提高了飛機剎車效率。
1 工作原理
1.1 飛機剎車系統原理
飛機剎車制動主要靠剎車時輪胎和地面間產生的結合力來使飛機減速。影響結合力大小的主要因素是結合系數μ。該系數與滑移量σ之間存在一個復雜的非線性關系,在整個剎車過程中,存在一個最大值μmax,它對應的滑移量為最佳滑移量σp,如圖1所示。
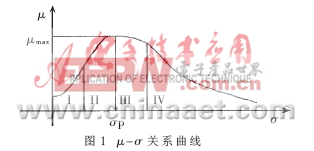
在整個剎車過程中,飛機速度不斷下降,因此σ也不斷變化,必然引起μ變化。為了達到最佳剎車,應不斷調節剎車力矩,使剎車機輪在結合系數為最大值或者在其附近區域II、III的情況下產生運動。
目前在剎車系統對μ-σ的處理中,μ取為定值,這與實際情況存在較大差異。有文獻采用多級σ值的計算方法來實現μ隨σ變化而變化,但控制效果并不理想。本文采用神經網絡來處理μ-σ的非線性關系,因為根據Kolmogorov神經網絡映射存在以下理論:任何一個給定的連續函數或映射,都能夠用一個三層神經網絡來精確實現。
現有剎車系統根據不同的跑道狀況,由速度反饋單元不斷地對參考速度進行修正,具有一定自適應能力。但當飛機由干路面進入積水路面時,會引起剎車減速率的突變,引起系統和起落架的震動。在本文研制的系統中,按模糊規則來控制系統,系統受路面影響較小,具有較好的魯棒性。
1.2 神經網絡原理
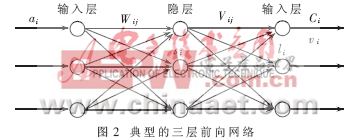
神經網絡中應用最廣的是多層前向網絡。多層前向網絡應用于具體實時控制問題時,必須有一個訓練網絡權值的算法,應用最廣的是BP算法。這種算法思路簡潔明了,具有自適應、自學習、自組織功能,根據實際訓練樣本不斷實時調節自己的參數,以達到理想輸出的目的。在本系統中即采用BP算法。圖2即為一個典型的三層前向網絡。
1.3 模糊控制原理
模糊控制是利用人的智能和經驗,制定一些模糊規則,進行推理,得出控制查詢庫,按查詢庫來控制系統。采用模糊控制,可以有效地克服參數變化對系統造成的不利影響,極大地增強系統的魯棒性。同時避免不精確建模造成的誤差,使系統有效地工作,故近年來獲得越來越廣泛的應用。神經網絡和模糊控制兩者是互補的。簡單地說,神經網絡是模擬人的大腦結構,而模糊控制模擬人的大腦功能,兩者的有機結合可組成性能更好的系統。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)




評論