基于PTR6000的足球機器人無線通信系統的設計

2.2 接收器的設計
接收器電路圖如圖2所示。接收端裝在每個機器人小車上,由于機器人小車的控制采用DSP控制器TMS320LF2407A,因而在接收端PTR6000無線通信模塊就采用TMS320LF2407A來控制。因PTR6000模塊與單片機采用的電平標準同為TTL/CMOS電平,所以在接收端直接將兩者連接。上電以后TMS320LF2407A首先配置PTR6000模塊,先將CS,CE設為配置模式,TMS320LF2407A通過PTR6000的CLKI,DATA將120 b配置數據移入PTR6 000模塊,完成無線模塊寄存器配置后,由TMS320LF2407A控制CS,CE啟動接收模式。當接收數據的地址與本機地址一致時,通過DRI輸出中斷指示(高電平有效),DSP通過DATA,CLKI接收數據。
另外,在本系統設計中增加了跳頻撥碼開關,與之對應的發射電路也設置了跳頻撥碼開關,通過調整撥碼開關的位置輸入不同的電平組合信號便可由軟件跳轉到相應頻道,以適應比賽時更換頻率的需要。
3 無線通信系統軟件設計
3.1 無線通信方式與協議
由于足球機器人的活動空間有限,通常采用單向通信方式。為了實現一對多的通信,采用廣播方式,所有的機器人采用與發射器相同的通信頻率。每個控制周期無線發射器發射一幀數據給本方所有機器人,各機器人根據自身編號讀取數據幀的不同字段,獲得自己的運動控制指令。本文引用地址:http://cqxgywz.com/article/154423.htm
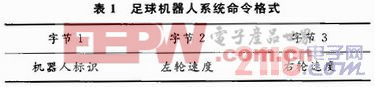
本系統的足球機器人采用兩輪差動方式驅動,因此,機器人的運動控制指令就是該機器人的左右輪速度設定值。足球機器人系統命令格式如表1所示。賽場上的機器人小車首先接收機器人標識字節,并與自身的標志相比較。當比較匹配時,則認定后面的2個字節是發送給本機的指令,準備接收;否則,屏蔽掉后面的2個字節的指令,等待下一組的指令信息。
3.2 收發器的軟件設計
通信系統的軟件主要有兩部分:一是AT89LS52上的從RS 232接收和往PTR6000發射數據;二是DSP2407A從PTR6000接收數據。圖3給出它們的流程框圖。

發射器中的單片機AT89LS52接收到上位機的通信指令后,將接收到的數據按照通信協議打包,然后通過對CLK1引腳和DATA引腳編程按照數據手冊上的時序圖將數據按位寫入PTR6000并以廣播形式發送給各個足球機器人。
足球機器人的接收程序則由機器人上的DSP2407A執行,每個機器人根據各自設定的編號,從接收緩沖區取出相應左右輪速度值。接收端的PTR6000在收到與本機地址相同的數據包后將DR1數據就緒引腳置為高電平,由于本設計將此引腳連接到了DSP的XINT2中斷引腳,因此DR1的上升沿將導致DSP轉入執行中斷服務程序,通過對CLK1和DATA引腳編程以數據手冊提供的時序讀取接收數據。
4 實驗數據與結果分析
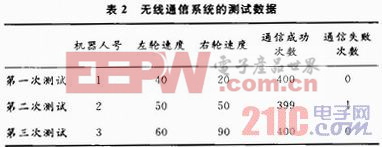
為了測試無線通信子系統的效果。這里做了實驗,從發射器發送相同次數(400次)的數據,記錄機器人接收到數據正確(通信成功)和錯誤(通信失敗)的次數。實驗結果如表2所示,可以看出,通信成功率很高,可靠性很好。
5 結語
本文詳細介紹了基于PTR6000通信模塊所開發的足球機器人無線通信子系統的設計與實現。實驗證明,本設計使機器人小車系統在精度和運行性能方面得到很大提高,可以滿足足球機器人對速度、可靠性及抗干擾能力的要求。








評論