地海雜波測試控制平臺的設計

4.2 工作原理
根據測定范圍的要求,確定天線指向的變化,伺服控制系統的主要任務是確保天線指向的穩定性,同時通過改變天線的俯角和仰角實時的檢測雜波信號。由于雜波信號的不確定性,準確穩定的確定天線的指向至關重要,因此控制系統中有兩個閉環回路:俯仰控制環路和方位控制環路。
在俯仰控制環路中,引入了水平基準。水平基準對俯仰方向的傾斜角非常敏感,從而確保與俯仰軸成垂直關系,進一步提高了俯仰控制的準確性,實現俯仰指令角的定向控制。
在方位控制環路中,引入方位基準。方位基準對天線平臺的方位非常敏感,從而實現方位指令角的定向控制。根據本系統的要求,伺服控制設備要具有自動定位目標范圍的功能,該任務由計算機控制完成。將俯仰角和方位角輸入計算機,計算機根據輸入參數從而確定天線的指向。
5 指向精度分析
在系統測試過程中發現由于制作工藝,伺服系統的固有誤差造成指向精度發生偏差,主要誤差源及數值通過測試得出,如表1所示。本文引用地址:http://cqxgywz.com/article/156611.htm
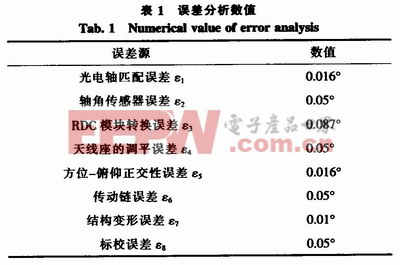
由表1可知總指向誤差(均方根值):
![]()
按方位、俯仰等誤差計算,得波束指向精度![]() 。
。
通過對總指向誤差,波束指向精度等相關參數的測試與計算,誤差值在可控誤差的范圍內,系統符合使用要求。
6 結論
文中采用偏置拋物面天線,伺服控制系統設計了地海雜波測試控制平臺,實現了復雜情況下,地海雜波的檢測,對消除或者減小雜波的影響,提高雷達的抗干擾能力提供了依據。該平臺提高了工作的時效性,它的推廣應用具有較為重要的意義。







評論