連續超聲波位置跟蹤器的設計原理及其在虛擬現實系統中的應用實現


圖4 數字鑒相器的工作波形圖 至于該測距系統的電路設計、實驗結果和性能分析請參考文獻[7].
四、實驗結果與分析 |

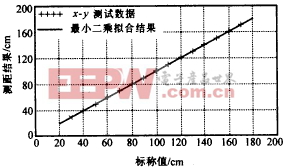
圖6 測距結果與標稱距離的比較 實驗中使用發散角α=60°的換能器,測距單元的距離測量范圍為30cm 表1 沿Cξ軸移動時跟蹤器的基準標稱坐標與測量坐標 |
| 次 數 | 基準標稱坐標(cm) | 測量坐標(cm) | ||||
| ξ | η | ζ | ξ | η | ζ | |
| 1 | -20 | 10 | 120 | -20.77 | 10.59 | 121.08 |
| 2 | -15 | 10 | 120 | -15.75 | 10.53 | 120.98 |
| 3 | -10 | 10 | 120 | -10.56 | 9.97 | 119.94 |
| 4 | -5 | 10 | 120 | -4.1 | 10.16 | 120.69 |
| 5 | 0 | 10 | 120 | 1.07 | 10.68 | 120.87 |
| 6 | 5 | 10 | 120 | 5.34 | 10.47 | 120.52 |
| 7 | 10 | 10 | 120 | 10.53 | 11.08 | 119.91 |
| 8 | 15 | 10 | 120 | 14.36 | 10.05 | 120.15 |
| 9 | 20 | 10 | 120 | 20.04 | 9.87 | 120.91 |










評論