一種基于TCRA的低軌星座通信系統的強占預留信道策略

這里稱不等式(12)右側的時間門限為強占信道時間門限,用ΔT表示。只有滿足Δτ>ΔT,才能保證改進的策略具有更好的服務質量。
2.2 算法描述
在執行基于TCRA的強占預留信道的信道分配策略時,首先根據實際低軌星座衛星的移動性參數、小區信道數量以及業務模型的相關參數,按(12)式計算強占信道時間門限ΔT。在一個呼叫的生命周期中主要執行的算法如下:
新呼叫到達階段:當T0時刻新呼叫發出信道請求時,系統首先執行TCRA-1策略,如果滿足此策略,系統分配給新呼叫一個合適的信道并實施預留,如果新用戶駐留本小區時間間隔內所有信道都有被預留的記錄,則搜索最遲被預留的信道,假設其預留開始時間為T1,則Δτ=T1-T0。如果Δτ>ΔT且可在下一小區實施預留,則接受新呼叫請求;否則,新呼叫失敗;如果系統沒有空閑信道,也阻止新呼叫接入。
呼叫切換階段:切換后用戶使用事先系統為其預留的信道;系統預測未來切換的時刻,并且在未來小區中相應的時間間隔內預留一個信道。如果以上條件系統無法滿足,則此呼叫切換失敗,解除為其預留的信道。無論切換是否成功,此呼叫都釋放目前小區占用信道。
呼叫終止階段:當用戶結束本次呼叫時,釋放目前小區占用的信道,解除下一小區相應信道的預留請求。
3 仿真結果與分析
3.1仿真模型和基礎假設
本文中的仿真建立在7小區網絡模型之上進行,如圖1。在7小區模型中用戶終端按照從小區A到小區G的順序切換, G中用戶的目的切換小區是A。7小區模型可以為仿真提供足夠的精度,且復雜度要低于采用98小區的模型[5]。
仿真中假設:模型中新呼叫到達時間服從泊松分布,小區中的新呼叫用戶出現位置服從均勻分布;用戶通話持續時間服從負指數分布,呼叫平均持續時長為180s;小區長度為250km;衛星星下點速度為27 000km/h;采用固定信道分配,每個小區平均分配20條信道;TCRA-1中的錯誤差量σt取0;GoS平衡因子k取10;仿真時間為24h。
3.2 仿真結果
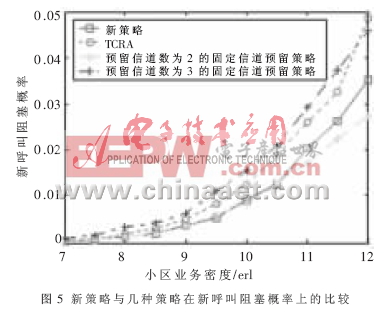
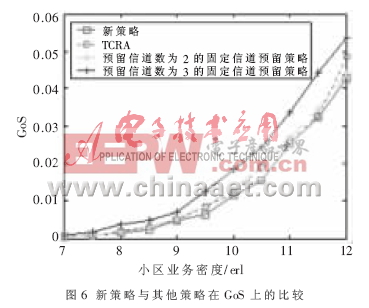
本文在固定信道分配的基礎上,分別采用了TCRA、基于TCRA的強占預留信道策略、預留信道數量為2和3的固定信道預留策略對通信過程進行仿真。對應不同的業務量,對幾種策略的切換失敗概率、新呼叫阻塞概率和GoS三項指標進行比較, 如圖4、圖5、圖6所示對比幾種策略,TCRA不產生切換失敗,這是此算法的優勢,但其產生的新呼叫阻塞率較高;固定預留2個信道策略的切換失敗率最高;固定預留3個信道策略的新呼叫阻塞率最高;提出的新策略產生一定的切換失敗,但即使是在業務量為12愛爾蘭時切換失敗率也僅有7.7×10-4,在新呼叫阻塞概率方面,明顯優于固定預留3個信道的預留策略和TCRA策略,對應不同的業務量,策略幾乎都能比TCRA降低20%的新呼叫阻塞概率。幾種策略中,本文提出的新策略具有最低的GoS。綜上,與TCRA和兩種固定信道預留策略相比,新策略都具有更好的QoS,且能較好地利用系統的信道資源。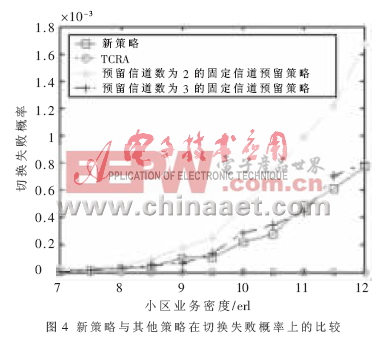






評論