一種改進的無線傳感器網絡節點定位技術

定義2 未知節點校正誤差

是加權因子,表示信標節點Aj的坐標誤差對未知節點校正誤差的決定權,從上述分析可知,信標節點Aj離未知節點的距離越近,所占的權重越大,m為用于坐標校正的信標節點個數。所以未知節點D最終坐標為

式中,xc1為未知節點加權質心法計算的X坐標;yc1為未知節點加權質心法計算的Y坐標。將質心算法所求的未知節點D的坐標代入式(10)中,即可更準確地估計出未知節點D的坐標。
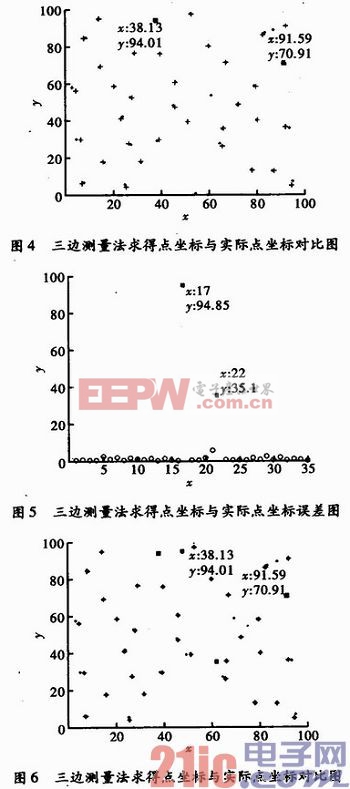
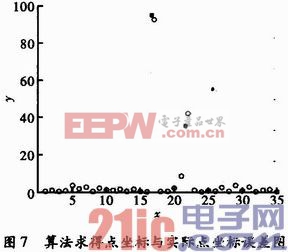
2 仿真實驗與分析
在Matlab仿真環境里,這3種算法均處于相同環境。節點個數都是50個節點其中38個錨節點和12個未知節點,坐標系為50 m×50 m,節點通信半徑為100 m,圖4~圖7為部分仿真結果。本文引用地址:http://cqxgywz.com/article/159376.htm

萬能遙控器相關文章:萬能遙控器代碼










評論