基于AGA的仿人機器人PID控制參數優化

從優化結果來看,PID控制精度有明顯的提高,AGA算法以最大迭代次數作為終止條件,收斂速度相對較慢但優化結果準確,說明遺傳算法具有較強的全局尋優能力。
進入ADAMS/PostProcessor模塊,可以將AGA優化仿真結果跟ADAMS軟件自帶的SQP優化模塊仿真結果進行對比,圖4的上半部分為AGA優化結果,下半部分為SQP優化結果,在兩種算法中,控制偏差隨時間的變化趨勢大體相同,且偏差值大小相比為優化前都有大幅的減小,充分體現了優化設計在控制系統中的作用,如圖4。
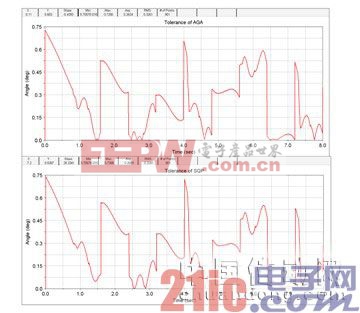
圖4 優化目標函數值對比
此外通過對目標函數進行數據處理,查看目標函數在控制過程中的最大值、最小值以及平均偏差值,可知使用遺傳算法進行的控制優化,無論目標函數的最大值還是平均值,都比采用ADAMS自帶的SQP算法的計算結果要小,見表1。
表1 目標函數各項數值對比

將AGA優化后的仿人機器人左膝關節角運動過程的實際軌跡跟理論軌跡重合情況跟優化前進行比較,圖中,藍色虛線表示關節角的實際軌跡,紅色實線表示關節角的理論軌跡。仿真結果,如圖5和圖6。
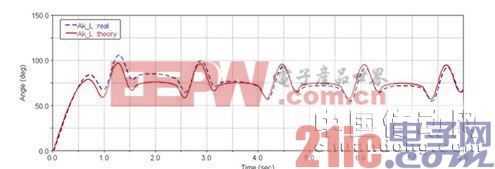
圖5 優化前關節理論與實際軌跡重合情況
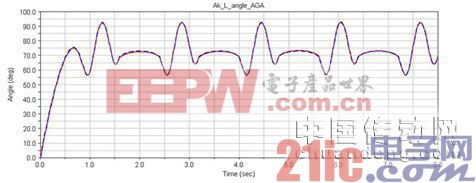
圖6 優化后關節理論與實際軌跡重合情況
比較圖6與圖7中可以看出,控制系統經過自適應遺傳算法優化后,其控制性能較之優化前有極大提升,關節運動的實際軌跡與理論軌跡更加接近,保證了仿人機器人行走的穩定性、可控制精度,提高了控制系統的實時響應速度,證明了基于遺傳算法的PID控制系統參數優化方法的正確性。
4 結論
針對仿人機器人PID控制系統參數確定存在的問題,本文提出了基于自適應遺傳算法定PID控制參數優化方法。將三個參數作為遺傳算法的個體,采用仿人機器人的理論關節軌跡與實際關節軌跡的最大偏差值作為目標函數,適應度函數與之相對應,采用適應度比例選擇策略,可以有效避免在遺傳算法的后期丟失最優個體的可能,以保證機器人控制系統參數選擇精度。通過ADAMS仿真結果對比分析,優化后的仿人機器人控制系統的控制精度、響應速度都有明顯提高,說明了基于自適應遺傳算法的PID控制能夠得到比傳統PID控制更優的結果。
參考文獻
[1]金奇,鄧志杰.PID控制原理及參數整定方法[J].重慶工學院學報,2011(7):91-94.
[2]于曉敏,于曉坤,耿蕊.PID控制器參數優化算法的仿真研究[J].計算機仿真,2008(5):212-215.
[3]姜玉春,吳紅燕.PID控制器的參數整定[J].萊鋼科技,2006(2):54-55.
[4]朱盈,朱俊.多種PID控制及其仿真比較[J].工業控制計算機,2010(1):53-54.
[5]牛薌潔,王玉潔,唐劍.基于遺傳算法的PID控制器參數優化研究[J].計算機仿真,2010(11):180-182.
[6]WANGP,KWOKDP. OptimaldesignofPIDprocesscontrollersbasedongeneticalgorithms[J].ControlEngPrac,1994,2(4):641-648.
[7]楊智民,王旭,莊顯義.遺傳算法在自動控制領域中的應用綜述[J].信息與控制,2000,29(4)14-17.
[8]張可村,李換琴.工程優化方法及其應用[M].西安:西安交通大學出版社,2007.
[9]黃友銳.智能優化算法及其應用[M].北京:國防工業出版社,2008.

pid控制相關文章:pid控制原理
dc相關文章:dc是什么
pid控制器相關文章:pid控制器原理









評論