利用傳感器檢測智能車加速度及速度全面解析方案

3 系統軟件設計
系統的基本控制策略是根據CCD傳感器檢測到的路徑信息,車速檢測模塊檢測到的當前車速信息和加速度傳感器檢測到的加速度信息,來控制舵機和直流驅動電機運動。
3.1 車速控制
為了提高機器人運行的穩定性,采用PID算法實現直流電機的轉速閉環調節,PID控制器的輸入量為給定轉速與輸出轉速的差值,采用增量式PID算法。
3.2 智能車平穩性控制
為了避免智能車發生側滑現象,應在智能車上安裝加速度傳感器,以檢測是否發生側滑。車速為v,轉向角為δ,車體質量為m,軸距為l,當理想轉向時,向心加速度為a,則a=mv2tanδ/l。當加速度傳感器反饋回的實際加速度a*小于理論加速度a時(實際中應當保持一定的死區),表明智能車系統存在側滑現象。這時便命令智能移動小車減速,速度參考量為
![]()
3.3 舵機轉向控制
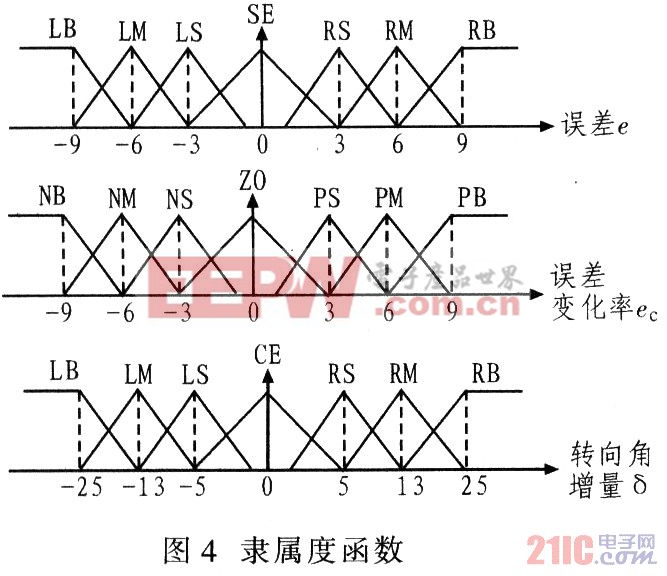
系統使用模糊控制算法控制智能車轉向。傳感器檢測的重點是轉向角誤差,當轉向角誤差相同時,不同的誤差變化率反映不同的軌道半徑,因此,該設計還檢測轉向角誤差變化率。當誤差量很小,且誤差變化率不變時,則判定為智能小車正沿著引導線行駛,則機器人小車沿直線行進;若誤差變化率較大時,表明智能小車正在偏離引導線,此時,需對航向角做相應調整。通過CCD圖像傳感器檢測白色地面上的黑線,根據返回的信號得出駕駛角誤差和誤差變化率,將CCD圖像傳感器視覺中心的誤差和誤差變化率作為控制器的輸入,分別用e和ec表示;輸出為駕駛角,用δ表示。模糊語言值分別選為:e:{LB,LM,LS,CE,RS,RM,RB};ec:{PB,PM,PS,Z0,NS,NM,NB};δ:{LB,LM,LS,CE,RS,RM,RB}。隸屬度函數采用三角形,如圖4所示。交疊系數β=(c1一a2)/(c2-b1),取0.75。根據駕駛經驗建立規則庫進行模糊推理后.利用重心法進行反模糊化得出舵機所要轉的角度。
3.4 智能車控制流程
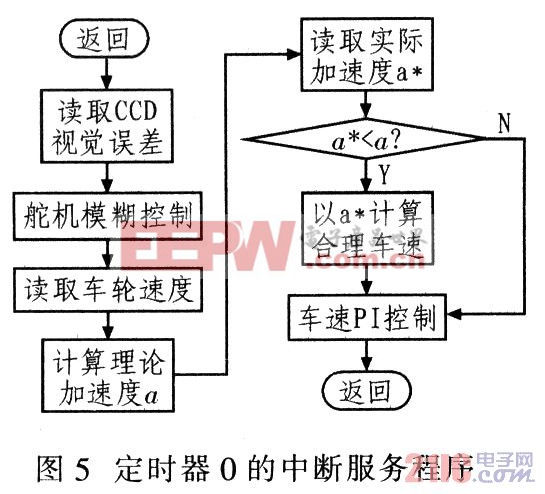
設計中,程序初始化完成后便進入空閑模式,等待中斷發生。中斷包括車輪轉速計數器中斷、CCD圖像捕捉中斷和以10 ms為周期的定時器0中斷。驅動電機和舵機的PWM控制信號由單片機的PWM模塊自動產生,其定時器0的中斷服務程序如圖5所示。
4 結語
以MC9S12DGl28作為控制核心,設計自主尋跡的智能車控制系統,在檢測到智能車運動信息和道路信息的基礎上,采用模糊控制算法控制舵機轉向,通過轉速PID調節的方式控制直流電機。實驗證明:該智能車在白色的跑道上能沿著一定寬度任意弧度的黑色引導線以較快的速度平穩地行駛,尋跡效果良好,速度和轉向控制響應快,系統的穩定性和抗干擾能力強,速度可以達到1.5 m/s,此方案已應用于全國智能車大賽。











評論