三維無線移動傳感器網絡k-覆蓋研究

(5)根據弧(iout,jin)上的流將傳感器移動到小立方體j。
其中,push-relabel(v)算法步驟為:
含有O(2L)個節點,每個節點iout至多有O(D3)=O(logL)條出度弧,而每個iin只有一條出度弧(iin,iout),因此圖
4 仿真與分析
為了檢驗理論的正確性,對移動傳感器網絡k-覆蓋仿真。將網絡劃分為邊長
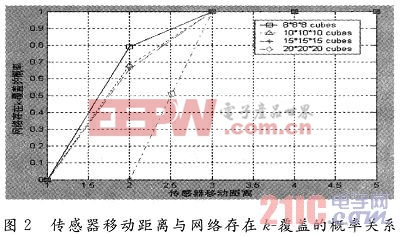
圖2表示對固定的k值(k=3),隨著移動距離的變化,不同規模網絡存在k覆蓋的概率(其中距離被dh規范化)。
由圖2可知,網絡從8×8×8增長到20×20×20的小立方體時,網絡達到k-覆蓋傳感器需移動的最大距離都為3dh。這說明,隨著網絡規模的增大,傳感器移動的最大距離增長微小。












評論