SPR污水處理系統的智能控制

2.4 PI調節器設計
為了提高系統的靜態性能和穩態準確度,系統在采用模糊控制的同時,又引入傳統的PI控制,組成了混合型模糊控制器的形式,PI調節器采用位置式數字PI算法,其參數KPI、TI按典I系統的二階最佳系統進行設計(具體過程省略),ui的變化范圍為[-12°,12°],強弱因子Kui=0.133 3,它與uf相加共同完成對藥簡閥門開度的控制。
3 模糊控制的軟件設計
鑒于常規的SPR污水處理系統一般均采用PLC對系統各部分進行開關量控制,為了節省硬件資源,降低成本,根據PLC內部資源的使用狀況,在允許的條件下,可在系統硬件方面增加A/D模塊、D/A模塊、COD在線檢測儀及變送電路、藥筒電閥門進行硬件改造;也可采用PLC+單片機的模式進行控制。
在軟件方面,設計時將增加硬件初始化、軟件初始化,參數Ke、Kec、Kuf、T、KPI、TI的預置和各變量的量化,模糊控制表及量化預置、計算、判斷等內容,其模糊控制子程序流程圖如圖2所示。本文引用地址:http://cqxgywz.com/article/161084.htm

4 模糊控制仿真與結論
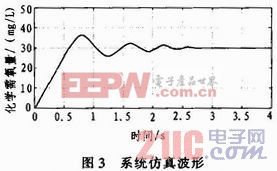
鑒于本設計的控制對象為電磁閥和污水凈化罐,根據它們的電磁物理過程和實際運行情況,其傳遞函數可以用2個慣性環節來等效,為了分析該模糊控制系統對輸入信號的響應情況,在MATLAB中,用FUZZY工具箱構造模糊控制器,建立了模糊控制系統仿真模型,仿真參數設置如下:電磁閥的慣性時間常數T1=0.05 s,比例系數K1=4.8;污水凈化罐的慣性時間常數T2=0.5 s,比例系數K2=0.44,采樣時間T=0.1 s,通過對出水COD的給定設置(30 mg/L)進行仿真,仿真結果如圖3所示。從仿真曲線可以看出,控制速度快,超調量小,調節時間短,系統具有良好的動態響應性能、靜態性能和較高的魯棒性。





評論