激光傳感器在車輛寬高超限檢測中的應用

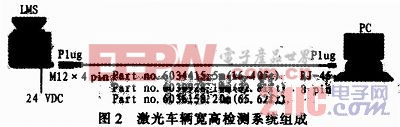
本系統對于數據的實時性要求比較高,且對數據的準確性要求相對較低,所以數據交換之前,首先要分別將LMS系列傳感器和工控機的IP地址設置為一個網段,再使用UDP通信協議來進行數據的交換。工控機接收到LMS系列傳感器上傳的極坐標信息后,再通過基于VB內核設計的數據處理程序對所有數據進行處理,數據處理的過程如下。
首先,通過傳感器上傳的數據判斷車輛的駛入與駛出。
第一步,傳感器上傳測量到的傳感器到被測車輛的不同點的極坐標的極半徑(ρ1,ρ2,ρ3,……,ρn)和對應的極角(θ1,θ2,θ3,……,θn);
第二步,通過坐標系的變換將被測點的極坐標轉換為平面直角坐標,即
(x1=ρ1·cosθ1,y1=ρ1t·sinθ1)(x2=ρ2·cosθ2,y2=ρ2·simθ2)(x3=ρ3·c∞θ3,y3=ρ3·sinθ3)……(xn=ρn·cosθn,yn=ρn·sinθn);
第三步,分別比較y1,y2,y3,……,yn,取最小的y值ymin;再分別比較x1,x2,x3,……,xn取掃描到的被測車輛的最左邊的x值xmin和最右邊的x值xmax;計算單次掃描的車輛的最大高度Height=H-ymin和最大寬度Width=xmax-xmin(H為傳感器距離地面的高度)。將備單次測量所得的寬度與高度進行比較,根據數據的變化曲線來判斷進車與出車。
然后,通過比較各單次測量的車輛的寬度和高度信息進行逐次比較,計算車輛的最大高度Height和最大寬度Width。最后,將得出的過往車輛的最大寬度和最大高度,與國家規定的車輛寬高限制值相比較,從而判斷過往車輛是否超寬超高,比較的結果通過工控機的顯示器顯示出來,同時保存測量結果到SQL數據庫。如果車輛超寬超高的話,工控機還會產生聲光報警,以提醒治超人員和超限車輛的司機出現了超限問題。
3 實驗結果及分析
本系統中的激光傳感器安裝在應用現場高度為6 m的龍門架上,激光傳感器的掃描測量扇面區域垂直于車道,有車輛穿過扇面掃描區域時,檢測系統自動計算出該車輛的寬度和高度值,并且顯示在工控機的顯示器上供工作人員監控用。












評論