基于紅外線光電開關的測速系統設計與應用

LabView 是一種用圖標代替文本行創建應用程序的圖形化編程語言,由NI 公司研制開發。現被廣泛應用于虛擬儀器設計相關的科研領域。根據測速系統原理和人機交互優化原則設計軟件流程如圖3所示。
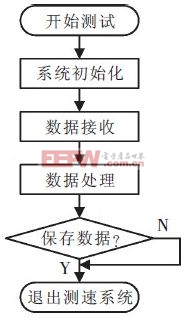
圖3 軟件設計流程圖
根據軟件設計流程圖編寫上位機軟件如圖4、圖5 所示。

圖4 虛擬儀器界面設計圖
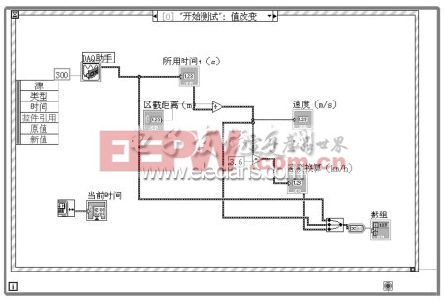
圖5 虛擬儀器底程序設計圖
3 誤差分析
隨著科學技術的日益發展和人們認識水平的不斷提高,雖然可以將誤差控制的越來越小,但終究不能完全消除它。誤差的分析與評定在測試領域中尤為關鍵,是檢驗測試系統性能的重要指標。
3.1 誤差來源
本系統的誤差來源主要是在測量傳感器之間距離s 時來自量具的儀器誤差Δs 和來自于計數器計時的誤差。計數誤差表現為當時間計數器清零并開始計數時, 由于計數器由時標脈沖下降沿觸發,所以可能出現計數器剛開始計數時時標脈沖就出現一個下降沿,而停止計數正好在一個下降沿結束后,這樣所計數的時間比實際時間多一個脈沖;同樣,如果開始計數是在下降沿剛出現后,而結束計數是在下降沿出現前, 會導致計數時間比實際時間少一個脈沖,造成計數誤差。計數誤差范圍為(-1/f,1/f),在此區間上平均分布。
此外, 環境因素所帶來的影響是多方面的,由于溫度、氣壓和水汽的影響,空氣折射率分布不均勻,折射率的梯度造成的光線發生彎曲;由于高速運動還會帶來空氣的氣流變化和氣體震動而引起對光路的干擾。加之一些不確定因素,主要反映在電信號上,環境影響帶入了電平的抖動以及一些高頻和低頻的干擾。但這些干擾一般在電路中可以去掉或忽略。
3.2 誤差綜合評定
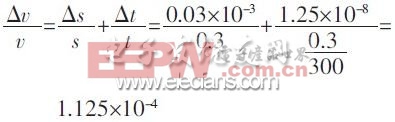
根據以上誤差的來源分析和誤差理論, 對式(2)求導得到誤差:

將式(3)轉換成最大誤差:

計時電路計時最大誤差

為依據國標QBT2443-1999 的規定計算。規定一級鋼卷尺自零點端起到任意線紋的示值誤差限為:Δ=(0.1+0.1L)mm,L 單位為m。若測試距離取0.3m,Δs 取0.03mm,待測運動物體速度為300m/s,那么將數據代入式(4)得到系統測速的最大相對誤差為:







評論