多參數橋梁振動監測系統設計

2.3 CAN通信接口設計
本文采用STM32系列的Cortex-M3內核控制器,其片內自帶了滿足CAN2.0A與CAN2.0B協議的硬件通信接口,并使用CTM8251AT隔離型CAN收發模塊完成了CAN總線的高速數據通信功能。以下為CAN波特率的計算:
BodeRate=PCLK1/CAN_Prescaler/(CAN_SJW+CAN_BS1+CAN_BS2)
由于CAN是掛接在APB1總線上,因此采用時鐘PCLK1,當PCLK1=72 MHz時,波特率為=72/9/16=0.5 MHz,CAN_Prescaler的預分頻值為1~1024。
在進行CAN組網布線時,需要注意的是,在中遠距離應采用120 Ω特征阻抗雙絞線,通信距離大于600 m以上,選用線徑大于0.75 mm2的電纜,超遠距離線徑應大于1.5 mm2。而且CAN總線的通信速率是隨著通信距離的增大而降低的,通常在1 km時,最高波特率為35 kb/s,2 km時為18 kb/s,當距離大于5 km則必須增加CAN中繼器,否則無法正常通信。
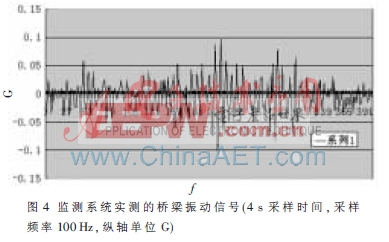
3 實測數據
如圖4為橋梁振動系統實測得到的縱向垂直振動加速度信號。本系統中還采用了DHT22型號的溫濕度檢測模塊與PH100SX型風速風向傳感器,這兩類傳感器和輸出都是數字信號,接口設計簡單,限于篇幅不再贅述。本系統的實際指標如下:
在線調節傳感器采樣率范圍為1~100 Hz;
在線調節傳感器放大倍數為1,2,4,8,16,32,64,128;
加速度測量范圍為0~±1.7g,最大靈敏度為1 mg;
加速度數據非線性度小于0.5%;
嚴格同步雙軸振動數據測量;
單路CAN最大節點數為60,CAN組網可達600個節點以上。
本文所研制的多參數橋梁振動監測系統能夠實現長時間無人值守的實時雙軸振動信號采集、溫濕度采集以及風速風向測量等功能。監控中心通過GPRS網絡獲取各監控橋梁的狀態信息,并自動根據橋梁狀態信號實時報警。該系統還可以應用于大型建筑體,攔河大壩等大型結構體的遠程健康狀態監控。
參考文獻
[1] 高占鳳,杜彥良,蘇木標.橋梁振動狀態遠程監控系統研究[J].北京交通大學學報,2007,31(4):45-48.
[2] 杜輝. 基于CAN總線的礦井通風監測系統[J].計算機工程與設計,2009(15):3565-3567.
[3] 楊海艷,孟彥京,李偉冰,等.振動傳感器特性及其在風力發電機中的應用[J].傳感器世界,2009(2):27-31.
[4] 鹿麟,林凌,李剛. ADXL203型雙軸加速計在傾斜度測量中的應用[J].國外電子元器件,2007(7):61-64.
[5] 吳永忠.高性能模擬前端AD7714及其應用[J].電子工程師,2006,32(8):56-59.







評論