多傳感器融合定位在高速鐵路的應用

2.2.1 數據融合的聯合卡爾曼濾波模型
此濾波算法中,取βm=0,即主濾波器沒有信息輸入,進一步優化系統,減少了運算量。2.2.2 系統濾波算法步驟
(1)由局部濾波器l處理GPS接收機輸出的列車位置信息,并給出狀態估計x1和估計誤差的協方差矩陣p1;
(2)局部濾波器2處理陀螺儀和里程儀輸出的角度信息x2和列車運行距離信息,給出狀態估計和估計誤差的協方差矩陣p2;
(3)局部濾波器3處理查詢應答器輸出的進路長度等信息,給出狀態估計x3和估計誤差的協方差矩陣p3;
(4)x1,x2,x3,及p1,p2,p3被送到主濾波器,并同主濾波器的狀態估計一起按式(1)和式(2)進行融合,得到全局最優估計和協方差矩陣

(5)利用主濾波器的最優估計值對3個子濾波器的狀態估計進行重置。即

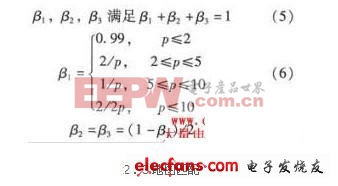
2.2.3 信息分配參數的選擇
不同的信息分配系數可以獲得聯邦濾波器的不同結構以及不同的容錯性能、濾波精度和計算量。本方案中設計了一種自適應聯邦卡爾曼濾波器。利用GPS接收機輸出的反映定位精度的參數為依據,自動調整P值的大小。本定位系統根據GPS接收機的p值大小來決定取值。具體的自適應算法為
2.3 地圖匹配
GPS和DR系統的組合導航在一定程度上提高了定位系統的精度和可靠性,但定位數據仍然存在一定誤差,并且當GPS數據丟失時,DR系統的誤差會累積變大。在實際系統中通常采用地圖匹配算法來進一步提高GPS和DR系統的精度。
地圖匹配的基本思想是將車輛定位軌跡與數字地圖中的道路網信息聯系起來,并由此相對于地圖確定車輛的位置。地圖匹配的算法分為兩個相對獨立的過程:一是道路選擇,主要是對道路進行分段,提取道路特征信息,然后采用適當的搜索規則和匹配算法根據當前傳感器給出的車輛信息,在地圖數據庫中尋找一條最有可能的道路;二是道路匹配,將車輛當前位置匹配并顯示在這條道路上,用于消除傳感器的定位誤差。
3 結束語
針對高速鐵路列車運行控制系統中的列車定位問題,提出了GPS/DR/MM組合定位的方案,利用卡爾曼濾波對多傳感器的數據信息進行融合之后再與電子地圖匹配,實時提供列車的定位信息。與單一傳感器定位方式相比,可以進一步提高列車的測速定位精度,保證了高速列車安全、可靠的運行。












評論