基于單輪車輛懸架的Fuzzy-PID控制器設計和仿真

2 Fuzzy-PID控制器設計
2.1 設計思想
以車身垂直速度與其期望值的差值e及差值變化率ec作為控制器的輸入量,根據實際需要的PID控制參數Kp、Ki、Kd相對于e和ec的模糊關系來確定模糊規則,通過在原來的單純的PID控制器上加入模糊推理器,組成Fuzzy-PID控制器可以對參數進行在線修正,使系統的動態特性明顯提高,并且顯著的提高了系統的抗干擾能力和魯棒性,同時可以減少調節的時間。Fuzzy-PID控制器的原理框圖如圖2所示。本文引用地址:http://cqxgywz.com/article/162108.htm
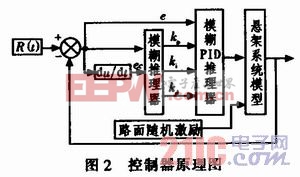
該系統實現PID參數在線自調整的計算公式為:

式中:KP、KI、KD為控制器的最終控制參數,Kp、Ki、Kd為常規PID控制器參數,kp、ki、kd為模糊推理器的修正參數。
2.2 模糊推理器及模糊規則的建立
模糊推理需要3個步驟:模糊化、模糊推理判斷和解模糊化。模糊化過程將實際的輸入量轉化為模糊量,經過基于模糊規則的模糊推理和判斷,最終將模糊量轉化為真實量,完成解模糊化的過程,這也是模糊控制器的工作原理及核心。
本文模糊推理器采用雙輸入、三輸出形式,控制器類型選為Mamdani型,解模糊規則選擇為Centmid法,輸入輸出隸屬函數均選擇為trimf形式。選取輸入變量e和ec及輸出變量kp的論域均為(-6,6),模糊子集定義為{NB NM NS O PS PM PB},選取輸出變量ki和kd,ki和kd只取正值,論域為(-3,3),模糊子集為{O PS PM PB}。通過閉環運行及模擬,觀察系統響應曲線,分析得到控制器參數kp、ki、kd對系統的實際影響,結合PID控制器參數整定理論,來確定最終的模糊規則,具體如表1所示。
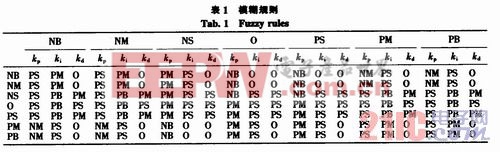
1)|e|較大時,為盡快消除偏差,提高相應速度,kp應取較大值,ki取0;|e|較小時,為繼續消除偏差,并防止超調過大,kp取值應減小,同時ki取小值。
2)e·ec0時,被控量朝著接近給定值的方向變化,若|e|較大,此時kp取中等或小值,ki取中等值,kd取0,以加快控制的動態過程。
3)|e|的大小表示的變化速率,|e|隨的增大,kp應減小。
2.3 Fuzzy-PID控制器

pid控制器相關文章:pid控制器原理










評論