基于PID控制算法的智能小車設計方案

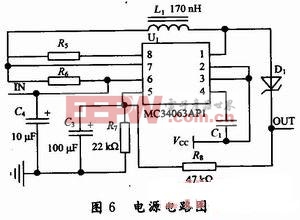
由于攝像頭需要一個9~12 V的電壓才能正常工作,而充電電池的電壓只有6~7.2 V。所以DC-DC升壓電路便成為必須。
DC-DC電壓變換采用MC34063A集成電路,該器件內部集成了溫度補償器、比較器、動態電流帶限占空比可控的振蕩器和一個高電流輸出驅動器。輸出電壓直接由兩個外接的誤差為2%的電阻控制。該電路可以方便地應用于升壓和降壓兩種場合,電路原理圖如圖6所示。
6 軟件設計
軟件結構圖如圖7所示。
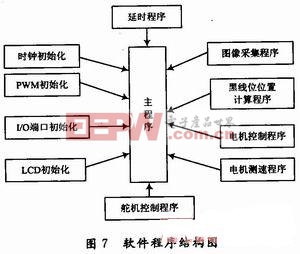
整個小車自動識別控制過程都是通過主控單片機芯片上的程序控制來完成整個智能控制過程。小車開啟后將自動沿著有一定寬度的黑線軌道行駛,行駛中將連續檢測到的黑線位置信息反饋給主控芯片,通過主控芯片處理后將執行結果反饋給控制器,進而控制小車前行方向,并通過軟件檢測小車速度及按鍵的更改信息最終將結果通過LCD顯示屏顯示。
7 結語
智能車設計涉及控制、模式識別、傳感器技術、汽車電子、電氣、計算機、機械等專業領域。整個設計沒有采用過于復雜的檢測方法或控制算法,而是采用了攝像頭圖像處理技術和經典PID控制算法,這樣不但能保證系統的可靠性、穩定性與快速性,而且節省了成本與工作量。在控制算法上,PID控制保證了系統的快速和穩定;在檢測方法上,攝像頭連續檢測的設計,保證了高速直線行駛的無抖動,以及光電管測速方法的應用,保證了測速系統的簡單可靠。

pid控制器相關文章:pid控制器原理







評論