霍爾傳感器的應用探討

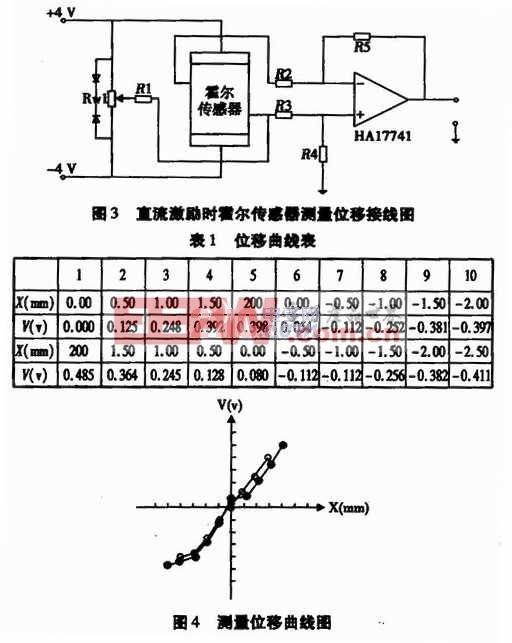
3 直流激勵時霍爾傳感器位移測量電路探討
3.1 位移測量電路分析
直流激勵時霍爾傳感器位移電路圖如圖3所示。控制極通過兩個反向穩壓二極管接到±4 V的直流穩壓電源上,以確保控制極之間的電壓為4 V。輸出極的某端接至RW1電位器的可調端,調節不等位電勢。不需要轉換電路是由于霍爾元件輸出的是電量值。最后經一級放大電路輸出。測量時,先調機械零位:調節測微頭使得霍爾元件位于同極性相對放置兩塊永久磁鋼的正中間;再調電氣零位;調節RW1使得數字表顯示為零。測量方法:(1)連續曲線法:向某一方向調節測微頭數圈,讀第一個數據,再向相反方向每旋轉一圈讀一個數據,到機械零位時電壓不為零(不回零度誤差),再繼續每旋轉一圈讀一個數據直至數圈;(2)斷續曲線法:向某一方向調節測微頭一圈,讀第一個數據,繼續每旋轉一圈讀一個數據直到機械零位,再向相反方向旋轉數圈回到機械零位讀一個數據電壓不為零(不回零度誤差),繼續每旋轉一圈讀一個數據直至數圈。數據表格如表l;曲線如圖4所示。
3.2 不等位電勢測量分析
測量不等位電勢時,按照不等位電勢的概念進行,使得霍爾元件位于同極性相對放置兩塊永久磁鋼的正中間,不使用電氣零位(RWI為零),直接測量霍爾元件的輸出電壓,約40 mV。
3.3 運算放大器分析
HA17741運算放大器實際就是uA741,它的主要指標為:輸入失調電壓10 mV,開環輸入電阻1 MΩ,開環增益88 db~100db,單位增益帶寬1 MHz,輸出開環阻抗60 Ω,輸出電壓轉換速度0.5 V/us。內含單個放大器,是高增益運算放大器,常用于軍事、工業及商業應用。這類單片硅集成電路器件提供輸出短路保護和閉鎖自由運作。
調零電阻及內部功能圖如圖5所示:
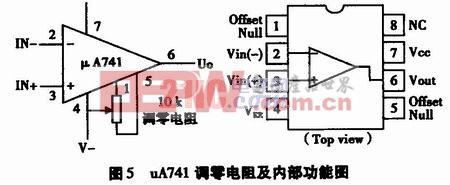
Offset Null為偏置(調零端),Vin(-)為反向輸入端,Vin(+)為正向輸入端,Vee為接地,Vout為輸出,Vcc為接電源,Nc為空腳。
uA741運算放大器實際電路配置放大倍數約8倍,首先將運算放大器的輸入端短路(R2、R3的左側端)進行調零,再給定一定的輸入信號值,測量放大器的輸出端電壓,將輸出信號與輸入信號之比即可。
4 結論
本文介紹了一種霍爾傳感器模板設計與實現。首先,根據需求進行了傳感器、放大器等選擇設計。其中選擇了霍爾傳感器,HA17741,其次,針對系統所使用的霍爾傳感器的性能和發展情況做了簡單介紹。最后,根據所選用的硬件設施進行連接,完成了電路圖,并根據硬件圖做了相關試驗,完成了調試。達到了設計要求。其試驗的結果是霍爾元件的移動改變磁場強度,與霍爾電勢的線性關系,使得對霍爾傳感器的原理、特性及應用進行了探討,有較強的典型性,而且本系統的設計具有功能強、成本低、元件少、可靠性好、簡單易行、使用范圍廣等特點。同時這種設計可根據具體情況作相應的擴展,使其滿足更多更高的要求。












評論