基于DSP 的新型球形機器人控制器設計

控制系統的命令傳輸采用無線收發方式。發送端由控制鍵盤、單片機和無線發送模塊組成。控制鍵盤包括“啟動”和“停止”按鈕。當按下“啟動”鍵時,單片機就會通過無線模塊發送START命令字;按下“停止”鍵時,單片機發送STOP命令字。接收端由接收模塊及串口傳輸接口組成。可以將接收到的數據通過串口發送給DSP。DSP控制器在接收到命令字后執行相應的動作。無線收發模塊如圖6所示。本文引用地址:http://cqxgywz.com/article/163401.htm
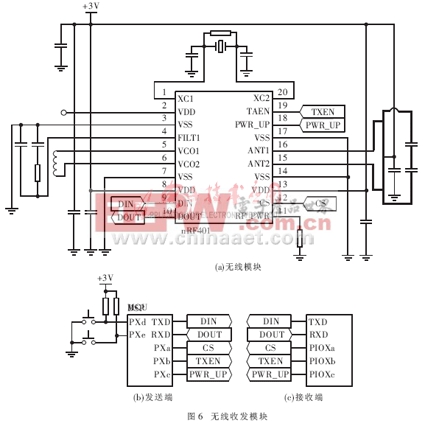
發射和接收模塊電路是一致的,只是發送端的無線模塊由單片機控制,而且有2個命令按鈕控制發送的數據,如圖6(b)。接收端的數據接口則連到DSP,如圖6(c)。
3 開環控制模型
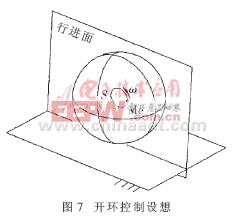
球形機器人的開環控制模型如圖7所示。假如適當地控制4個偏心重塊的運動,使它們的合質心Mc的運動軌跡S在豎直且過球心的行進面內作勻速圓周運動;如果忽略偏心重塊轉動造成的離心力和慣性力,則球體就會在平面上作直線運動或近似直線的運動。
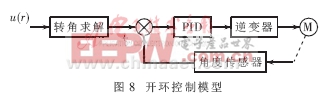
輸入為給定的軌跡方程,即圖7中的S,然后由轉角求解器求出各電機的轉角,并與實際采樣所得的轉角值求差分,再經PID控制器算出占空比和轉向。
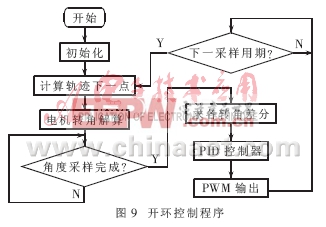
基于上述開環控制模型的控制程序框圖如圖9所示。由于DSP具有強大的處理能力,使得以DSP搭建的系統能及時、快速地處理機器人的多種信號。本文所描述的球形機器人控制系統,正是基于DSP處理器的這一特點,充分運用DSP強大的乘法運算能力,快速地處理機器人的位姿解算和實時控制,使球形機器人實現直線運動或更復雜的軌跡運動。

pid控制器相關文章:pid控制器原理










評論