基于CAN總線的分布式多電機同步控制系統

CAN總線節點要有效,實時的完成任務,軟件的設計是關鍵,也是難點。軟件的設計主要包括變頻器內部模塊的信號流程設計和PC機中CAN通訊和控制軟件的設計兩部分。
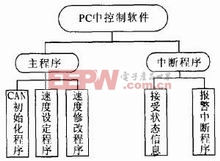
圖3 PC控制系統軟件框圖
PC機中CAN通訊和控制軟件的設計
PC機中的軟件主要完成CAN卡的初始化,主令電機轉速的設定,主令電機轉速的調整,以適應生產不同產品的工藝要求。同時應具有故障報警功能。程序框圖如3所示。
主令電機變頻器控制信號流圖設計
Lenze9326為矢量控制型變頻器。變頻器內部共提供996個參數用于設定變頻器內部70個軟件模塊的工作狀態。但每次設定最多使用50個功能模塊。變頻器提供每個模塊的運行時間。所選模塊的運行時間總和不能超過規定的時間限定。
現給出設定好的控制主令電機的變頻器11的信號流程圖,如圖4所示。使其工作于最大轉矩限定的速度控制模式。圖4中功能塊均由變頻器提供,設定后即可使用。圖4中X5/E1~E5為數字量輸入端子,同PLC的數字量輸出點相連,用于控制電機的急停和互鎖。DIGIN為數字量輸入單元(設定數字輸入高或低電平有效),控制R/L/Q輸入和電機點動開始(JOG)。R/L/Q用于控制電機的正轉/反轉和急停,此處設為電機永遠正轉和接受外部急停信號輸入這兩項功能,將R/L/Q的QSP輸出端同MCTRL塊的QSP輸入端相連,通過MCTRL塊最終實現電機急停。
AIN1為模擬量輸入單元,完成給定速度信號的放大功能,將此信號通過CAN總線發送到變頻器12和NSET塊(速度設定調節塊),NSET塊根據NSET塊LOAD點和JOG1點輸入選擇輸出N(給定速度)或JOG1(固定速度)到MCTRL(電機控制塊),NSET塊中LOAD點輸入由MCTRL塊QSP-OUT點(急停)輸出決定。MCTRL塊實現電機的相位控制、速度控制和電機轉矩控制。MCTRL塊的RESOLVER連接旋轉變壓器,實現速度反饋。MCTRL塊的LO-M-LIM和HI-M-LIM設定電機的下、上最大轉矩限幅值。MCTRL塊的FLD-WEAK點根據所使用的變頻電機說明設定電機勵磁。MCTRL塊的PHI-LIM設定相位控制功能的修正值,MCTRL塊的MMAX和IMAX輸出顯示電機是否運行于轉矩限幅狀態和電流限幅狀態。MCTRL塊的NSET輸出點(電機的實際線速度)同CMP塊(比較塊)輸入相連,檢測電機速度是否大于50r/min,將結果送往STAT塊(此塊信息自動發送到CAN總線供PLC接收,決定生產線處于手動控制狀態/自動控制狀態)。
DCTRL塊控制變頻器處于不同的工作狀態(跳閘、跳閘復位、快停、正常),且將狀態信息通過DIGOUT塊(數字量輸出塊)和STAT塊輸出,分別供PLC和PC監控機接收。跟隨電機的控制變頻器信號流程圖中主速度設定來自于CAN總線,用于修正的輔助速度設定來自于集成一體化激光位移傳感器。
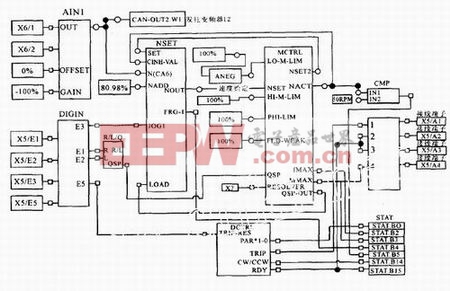
圖4 變頻器11信號流程圖
CAN總線參數設定
由于變頻器距被控制電機約50m。根據文獻[1]Lenze變頻器9326設置手冊,此時傳輸速率應設為1Mbits/s能保證通信正常。PC中的CAN卡和可編程控制器的CAN接口傳輸速率也必須設為1Mbits/s。為了實現各段生產線運行速度的自動跟隨,將變頻器11的CAN地址設為1,發送號設為258,變頻器12的CAN地址設為2,CAN-IN2接收號設為258,CAN-OUT2發送號設為259,變頻器13的CAN地址設為3,CAN-IN2接收號設為259,CAN-OUT2發送號設為260,變頻器14的CAN地址設為4,CAN-IN2接收號設為260。
結論
CAN總線的優點已得到公認。因其高性能,實現簡單等突出優點得到越來越多的研發人員的青睞。文中的控制策略已在某廠生產線的集散控制系統中得到應用。生產運行表明,整個系統具有控制精度高。運行穩定、操作簡便及維護方便等特點。可以滿足生產高質量、高精度產品的要求。
矢量控制相關文章:矢量控制原理










評論