基于單片機的雙模糊溫度控制器設計

2.2 雙模糊控制策略
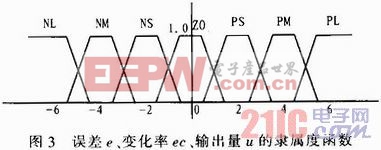
考慮溫度控制的特點,將誤差e、變化率ec及輸出量u的論域設為[-6,6],將其量化為13個等級,并分別為誤差e、變化率ec、輸出量u選取7個語言值,即{NL,NM,NS,ZO,PS,PM,PL}。三者的隸屬度函數均采用梯形分布,如圖3所示。本文引用地址:http://cqxgywz.com/article/171136.htm
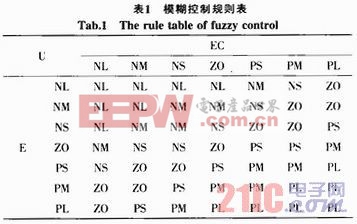
根據對工業過程控制的經驗總結,制定相應的模糊控制規則表如表1所示。
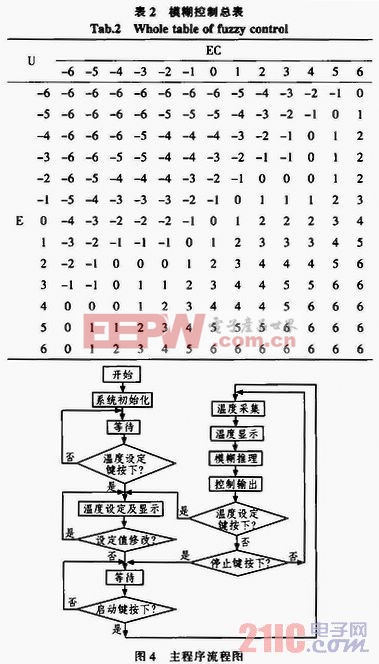
為提高系統的實時響應速度,事先根據模糊控制規則表及語言變量賦值表,離線計算出模糊控制總表如表2所示,該表經嚴格的實踐儉驗和反復修改后存放在單片機的程序存儲器中然后根據輸入量e及ec在不同工作狀態的實際變化范圍及其論域,計算出量化因子Ke1、Kec1和Ke2、Kec2,并確定出比例因子Ku1和Ku2。實際控制時,模糊摔制器把系統在不同工作狀態下的輸入量e及ec分別乘以相應的Ke、Kec,并量化到輸入量的語言變量論域中,再根據量化的結果與模糊控制總表進行比較,通過查表程序得到所需的輸出量U,最后乘以Ku,得到系統在不同工作狀態下的實際輸出控制量u。












評論