基于單片機的水位控制系統設計

2.2 電機驅動模塊設計
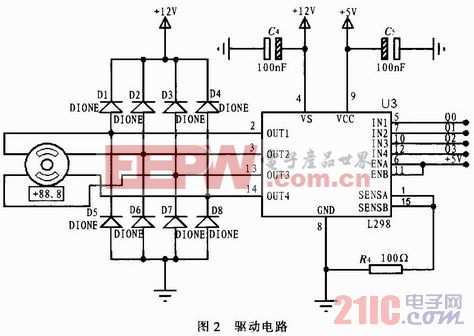
本次設計的主要目的是控制電機的轉速,其電機采用兩相四線步進電機,因此電機驅動模塊是必不可少的,其方案決定采用專用的電機驅動芯片L298N,此電機驅動芯片的電路設計簡單、抗干擾能力強、可靠性好。其電路原理圖如圖2所示。本文引用地址:http://cqxgywz.com/article/171232.htm
2.3 水位檢測模塊設計
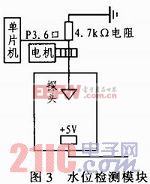
傳統的水位檢測有采用壓力傳感器,再經過AD轉換,傳送到單片機,運算復雜,精度不夠高,或者是采用接觸式拾取信號,在水箱的不同位置安裝若干個金屬棒來感知水位的變化,直接利用金屬和水的導電性采集水位信號,運算簡單,但不能實現連續水位的監控。本次設計利用單片機控制步進電機,在步進電機上懸掛一個移動探頭,探頭接觸到水,則單片機采集到信號為高電平,否則為低電平。本設計能進行連續水位的監控,程序運行簡單,控制精度高,成本低。其電路圖如圖3所示。
2.4 顯示模塊設計
本設計方案采用128x64LCD液晶顯示器,該顯示器功率低,驅動方法和硬件連接電路較為簡單,顯示屏幕大、可對漢字和字符進行顯示。












評論