基于ARM7的嵌入式游戲系統設計與實現

4.2 系統軟件流程
礦井端由AT91R40008開發板、TC35i, GPS15 OEM板組成,AT91R40008開發板帶有兩個串口,其中一個串口與GPS接收模塊連接,接收來自衛星的位置信息,另一個串口與TC35i連接,將接收到的定位數據打包成短消息格式通過現有通信網絡發送出去,實現人員定位和監控管理。整個系統的工作流程大致如下:系統加電進行復位后,自檢并初始化。 GPS模塊首次開機后會自動搜索星歷歷書等信息,接收到定位信息后,將我們所需要的經緯度等位置信息進行編解碼處理,打包成短消息的格式,通過TC35i 模塊發往用戶終端或總機,實現全球范圍內的定位和監控管理。整個系統流程圖如圖2所示:
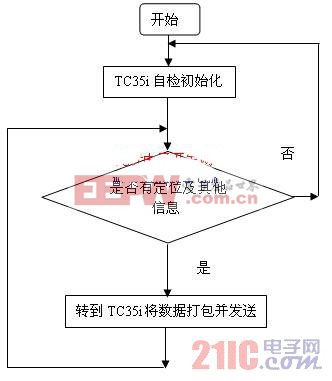
圖2 系統流程圖
5.結束語
基于ARM嵌入式技術的GIS煤礦安全實時監測系統,主要是利用ARM的強大功能,結合GRP、GSM技術實現了礦井端的煤礦安全實時監測,相對于傳統的采用8位單片機作為主控芯片的礦井端,其復雜監控的功能更強,系統更靈活,適用性更好,同時具有更大可擴展性,對加強煤礦安全生產管理將具有一定的推動作用,社會效益和經濟效益良好。
參考文獻
[1]張普京,米戰.基于GIS的礦井安全監控系統研究與應用.中州煤炭,2006,6
[2]劉志強.煤礦安全監控監測系統解決方案.山西科技,2007.1
[3]安藏鵬,趙建貴,賈琳瑋,李長青.煤礦瓦斯集中監測監控網絡系統的研究.工礦自動化,2005.6
[4]周立功.ARM嵌入式系統軟件開發實例[M].北京:北京航空航天大學出版社,2006







評論