基于單片機的智能泊車系統設計

1.4 電機驅動電路設計
動作執行單元為驅動小車左右輪的兩個減速直流電機,控制它們的轉速,就控制了小車的運動狀態。但是由動作控制單元發出的控制信號非常微弱,無法直接驅動直流電機,須匹配設計合理的驅動電路,常用的驅動電路為H橋。在設計過程中發現,由于三極管導通、關斷的時間不統一,導致用三極管搭建的H橋在電機電流換向的時候經常發生微短路,使得三極管發熱現象很嚴重,整個電路電源波動很大,非常耗電。因此,本設計最終采用了集成H橋L298。除此之外,在設計過程中發現電機轉動產生的反向電動勢會嚴重影響傳感器的輸出狀態,將錯誤的路徑信息送給處理器,導致小車經常產生錯誤動作。因此,本設計采用了雙電源供電,即傳感器和芯片共用一組電源,電機專用一組電源,中間信號的傳輸采用了4N25光耦電路進行電氣隔離。
1.5 光源引導電路設計
本設計采用光敏三極管作為光源檢測傳感器,因為其感光電壓變化明顯(電壓值變化在60~100mV左右),價格便宜。光源引導模塊需要在小車前方安裝3個光敏三極管,通過車庫發出的光源信號來引導小車到指定車庫停車,使用LM324作為光源引導模塊的核心放大器件,將信號進行放大處理。
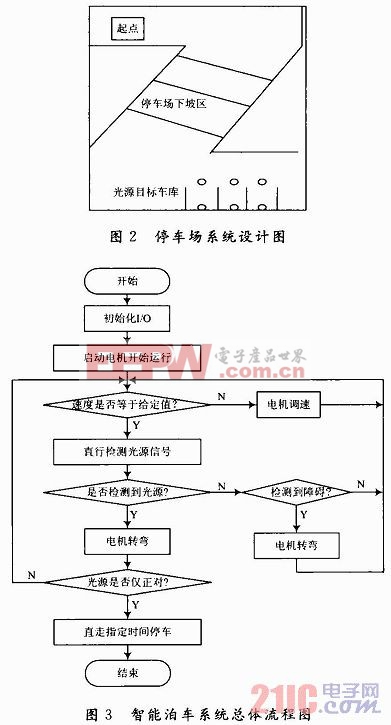
1.6 停車場系統設計
為了更好地完成小車避障、光源引導和入庫過程,停車場系統設計也是十分重要的。停車場系統設計圖如圖2所示。本文引用地址:http://cqxgywz.com/article/171888.htm












評論