基于單片機控制的連續式搗固車起撥道補償設計

4 系統軟件設計與試驗結果
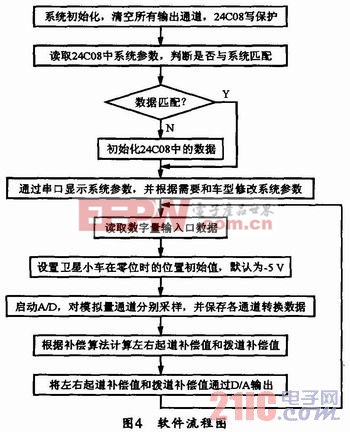
4.1 軟件設計
本文介紹的起撥道補償系統控制軟件的主要功能包括串口菜單顯示、通過菜單修改作業參數、外部信號采樣輸入、補償計算、數據處理以及信號輸出等。其軟件流程如圖4所示。本文引用地址:http://cqxgywz.com/article/172926.htm
4.2 實驗結果
筆者分別用三點法和四點法對本設計進行了撥道補償測試。測試時假設衛星小車零點在后,前端偏移為20 mm,作業點理論正矢為30 mm,測試中,衛星小車的位置從-10 V到+10 V變化,每次給定的移動距離變化量為1 V(100 mm),檢測弦線BC長度為4700 mm,BD14750 mm,AD為20750 mm,表1所列是三點法撥道補償的測試結果。
從表1可見,三點法撥道補償值的最大誤差值為0.06 mm。


表2所列是四點法撥道補償值的測試結果數據。從表2所列數據可以看出,四點法撥道補償值的最大誤差為0.04mm。
5 結束語
事實上,這種多功能起撥道補償系統在實際應用中還加入了硬件抗干擾措施和軟件抗干擾措施。為了提高系統的穩定性和精度,對模擬量輸入還采用硬件濾波和軟件濾波等方法來減小誤差,由表1和表2中的數據可知,三點法補償的最大誤差為0.06 mm,四點法補償的最大誤差為0.04mm,可見系統的穩定性強,精度較高。目前,該補償系統已投入生產。











評論