一種基于Salvo的通用CAN/LIN網關

1 引言
CAN(Controller Area Network,即控制器局域網)是上世紀80年代初由德國Bosch公司提出專用于汽車的串行總線。由于其數據傳輸率高,傳輸距離遠,實時性好,可靠性高等眾多優點已在汽車工業、航空工業、工業測控等領域廣泛應用。在某些通信性能要求不高的場合為了降低網絡控制的成本,1998年由汽車制造商奧迪、寶馬等汽車公司、火山通信技術公司以及半導體生產商摩托羅拉(Motorola)公司共同創建了LIN協會,其目的是為汽車網絡系統提供一個開放的A類(低速率、低成本)串行總線通信標準。由于LIN總線性價比極高,非常適合用于車燈、車門、座位等對通信要求不高,對成本敏感的部件。
目前,高級汽車一般采用分級網絡控制,對發動機、傳動系統、制動系統等重要,且對通信性能要求高的部件采用CAN總線控制;對車身,如車燈、車門等對通信性能要求不高,而對成本敏感的部件采用LIN總線控制,CAN總線與LIN總線間通過CAN/LIN網關數據轉換以實現CAN設備與LIN設備的相互訪問。這種分級網絡控制模式也適用于工業控制、安全防護等領域。本文討論一種基于實時操作系統Salvo的通用CAN/LIN網關。
2 網關模型
網關是連接兩個通信協議和結構不同的網絡設施。對于CAN/LIN網關,它的工作就是對信息拆除封裝和重新封裝,以使它們能被CAN總線和LIN總線上的網絡節點讀取,即實現CAN總線和LIN總線之間協議數據單元(PDU)的轉換。CAN/LIN網關的模型如圖1所示。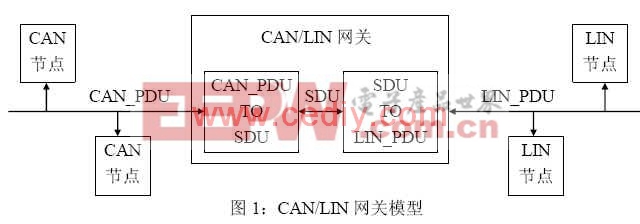
依照國際標準化組織制定的開放系統互連參考模型OSI/RM,CAN總線和LIN總線都包括物理層和數據鏈路層。應用層由各種應用系統各自定義,其中CAN總線已有一些應用較廣的高層協議,如CANOpen、NetDevice等。CAN/LIN網關的分層結構如圖2所示。
3 網關硬件
CAN總線和LIN總線協議數據單元的數據量小,系統采用高速8位微處理器DDMicrochip新型增強FLASH單片機PIC18F4680。PIC18F4680片內集成64KB FLASHROM作為程序存儲器、3KB RAM作為數據存儲器,能滿足處理CAN總線和LIN總線協議數據單元轉換所需的程序代碼和數據存儲的需求;PIC18F4680片內集成1KB EEPROM可用于存放系統狀態信息,即使掉電重啟也能恢復到掉電前狀態。另外,PIC18F4680片內集成支持CAN2.0B的CAN控制模塊,CAN數據鏈路層協議可由CAN控制模塊執行,從而減輕MCU處理CAN協議的數據處理壓力;PIC18F4680還集成可支持LIN1.3的USART,進一步減輕MCU處理LIN協議的數據處理壓力。
為增強CAN總線的抗干擾能力,CAN總線驅動器MCP2551與PIC18F4680間采用高速光偶6N137隔離,并且獨立供電,PIC18F4680采用LIN總線驅動器MCP201的電源模塊供電;MCP2551采用專用DC/DC變換器供電。
實時多任務系統對于相同優先級任務采用以時隙為單位的時間片循環方式(round-robin)切換。為提高時隙精度,從而提高切換時間精度,PIC18F4680的定時計數器1(TMR1)外接標準時鐘晶振32768Hz。系統時基由TMR1通過標準時鐘晶振振蕩產生。網關硬件電路如圖3所示。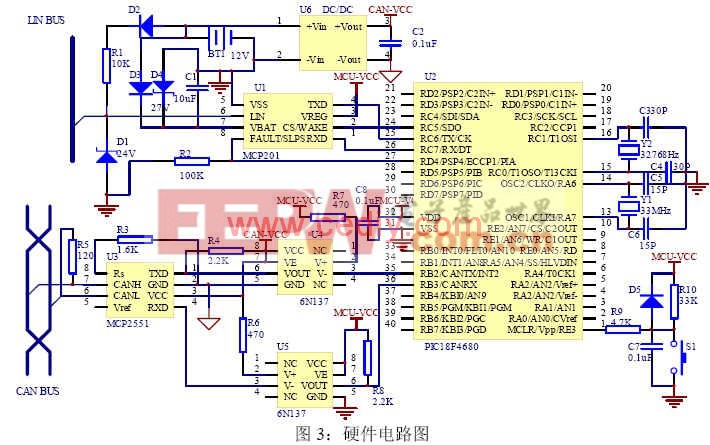












評論