基于變系數滑模觀測器的PMSM伺服系統

3.2 轉子位置估算

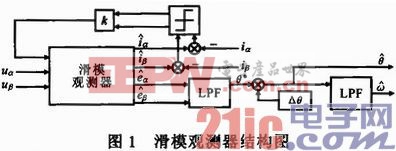
由于采用了LPF來獲得反電勢,不僅幅值發生了變化,同時也引入了相位延遲,導致所求的轉子位置角度滯后一定角度。滯后角度與截止頻率和電機轉速有關。因此需要根據LPF的頻率響應做一個相位延遲表,來獲取運行時相應轉速ω的相移角△θ,對
3.3 轉速估算及轉向判定
轉速的估算可由轉子位置的估算值得到,即
與轉子位置獲取相似,為保證轉速估算值的平滑性,在其后加一個一階LPF。滑模觀測器的結構圖如圖1所示。本文引用地址:http://cqxgywz.com/article/175869.htm
4 系統實現及實驗
為驗證設計的正確性和可靠性,設計了基于上述滑模觀測器的無傳感器PMSM伺服控制系統,其結構如圖2所示,包括一個速度外環和兩個電流內環。
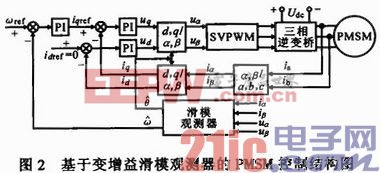
系統采用dsPIC6010A作為控制器,PMSM的標稱參數為:額定轉速6 000 r·min-1,工作電壓300 V,繞組相電阻12.5 Ω,繞組相電感0.58 mH,極對數為3。為便于觀察參數的詳細情況,通過串口與控制器進行通訊,并將控制器的各個參數、信號實時顯示在上位機調試平臺。













評論