GPS接收機載波跟蹤環路設計

5.3 載波跟蹤環仿真及分析
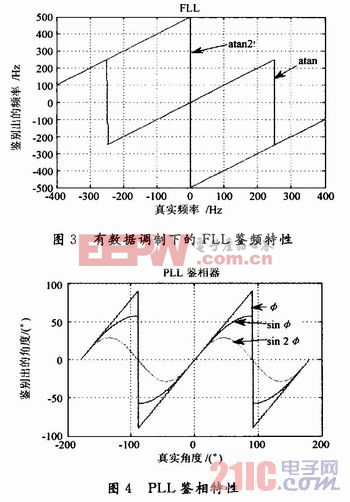
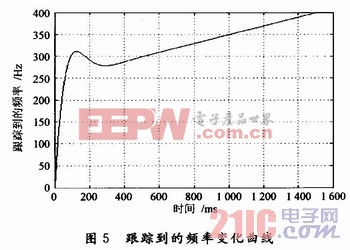
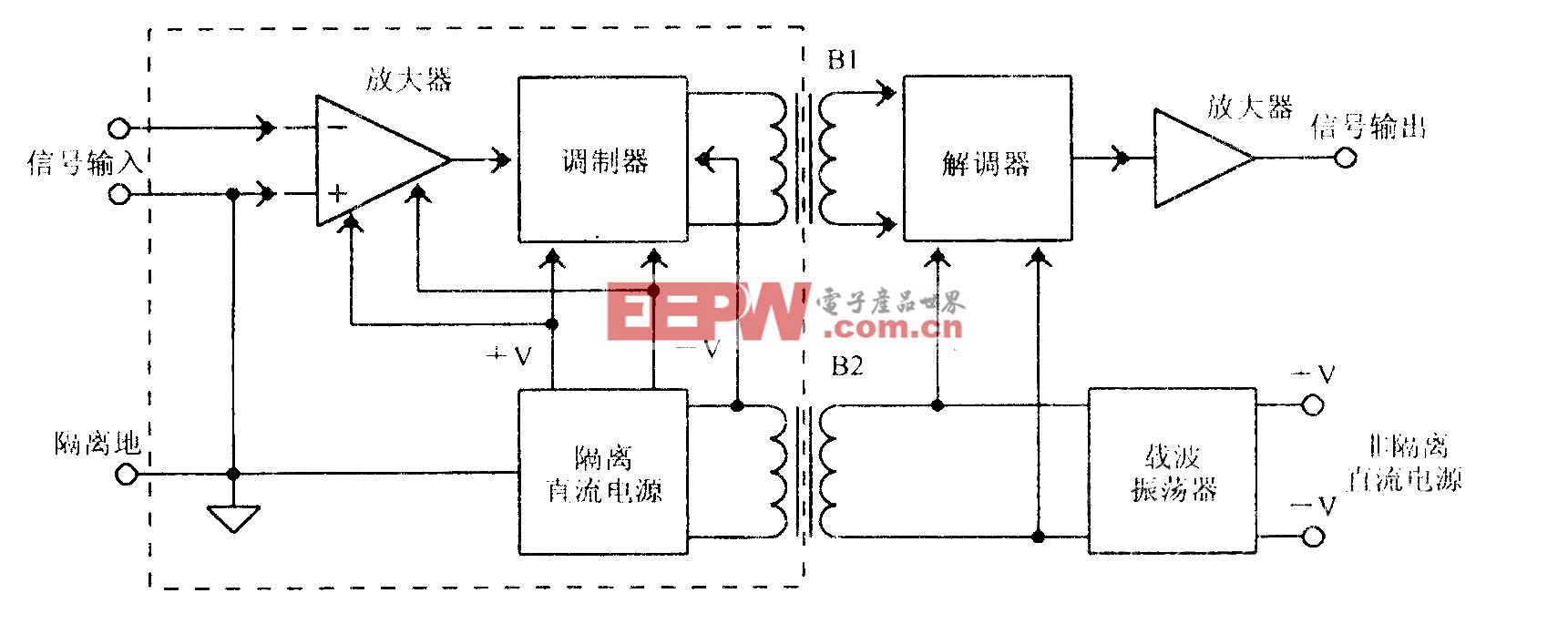
根據5.1和5.2節的仿真結果,FLL選擇二象限反正切鑒別器,PLL也選擇二象限反正切鑒別器。將鑒別器結果送入圖2所示的環路濾波器,濾波結果送給數控振蕩器,形成圖1所示的閉環模式。接收機捕獲時采用時域和頻域二維搜索算法,根據FLL鑒別器的頻率鑒別范圍,設定頻率搜索步長為500 Hz。接收機速度為500 m/s,加速度為10g時的仿真結果如圖5所示。由圖5可以看出,載波跟蹤環路可以快速、準確地跟蹤頻率的變化,在3~4 s即可達到鎖定狀態。本文引用地址:http://cqxgywz.com/article/179487.htm
6 結語
采用了二階鎖頻環輔助三階鎖相環的載波跟蹤環路。通過仿真可以看出,選用的鑒別器鑒別范圍大,精度高,且對數據跳變不敏感。由鑒別器、環路濾波器和數控振蕩器形成閉環回路,在高動態環境下,環路鎖定時間短,載波測量精度高,具有一定的實用價值。









評論