開關電源無模型控制的研究

4.1 無模型控制的總體概述
在控制律設計中一般的需要建立動態系統的數學模型。經典的方法要求這種數學模型必 須事先建立至少其結構必須事先確定。而且模型愈精確愈好。無模型控制律的設計中,突破了控制律對數學模型盡可能事先精確的建立這一要求的限制。
我們的建模手續是伴隨反饋控制而進行的。初始的數學模型可以是不精確的,但必須保證所設計的控制律具有一定的收斂性.我們所設計的無模型控制律是邊建模邊控制,得到新的觀測數據后,再建模再控制.如此繼續下去,使得每次得到的數學模型逐漸精確,從而控制律的性能也隨之得到改善。我們把這種手續稱之為實時建模與反饋控制一體化手續。
4.2 建模與自適應控制一體化途徑
在參考文獻中,提出了如下的泛模型:
y(k)-y(k-1)=φ(k-1)[u(k-1)-u(k-2)> (4-1)
不失一般性,這里假定被控動態系統S的時滯是1,y(k) 是系統S的一維輸出, u(k-1)是P維輸人。φ(k)是特征參量,它是利用某種辨識算法在線估計的,k是離散時間。我們將會看出,在實時辨識D實時反饋校正的辨識與控制一體化手續中,φ(k)有明顯的數學與工程意義。
4.3 實時建模與反饋控制一體化
具體的,我們的建模與反饋控制一體化的框架如下:
(1)依據觀測數據和泛模型
y(k)-y(k-1)=φ(k-1)[u(k-1)-u(k-2)]
利用適當的估值方法,得到了φ(k-1)的估值φ(k-1)。
(2)尋求φ(k-1)的向前一步的預報值φ*(k),一個簡單的方法就是取
φ*(k)= φ*(k-1)
在尋求控制律時,我們把φ*(k)仍記成社φ(k) 。 (3)把控制律
作用于系統S,得到新的輸出貝y(k+1)。于是得到了一組新的數據{y(k+1),u(k)} 。
在這組新數據的基礎上重復(1),(2)和(3),即可又得出新的數據{y(k+2),u(k+1)}如此繼續下去。只要系統S滿足一定的條件,在這種手續的作用下,系統s的輸出y(k)將逐漸地逼近y0。
4.4 控制器程序的設計
目前在工業生產過程控制中應用的控制器,絕大多數是經典的PID調節器及其變種,對于耦合情況不嚴重的系統,PID調節器的控制效果還能令人滿意,但對耦合嚴重的系統,PID調節器則顯得無能為力,下面以PID調節器為基準,將無模型控制器與PID調節器進行比較,用于說明無模型控制器具備較好的解耦和抗干擾能力。無模型控制流程圖如下:
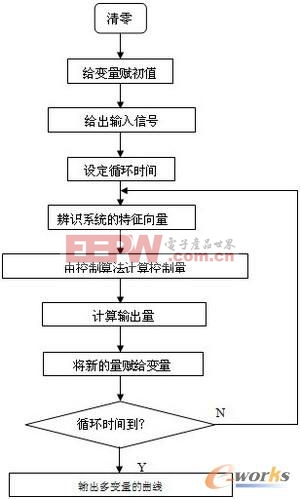
圖3 無模型控制流程圖








評論