可編程控制器在船舶減搖鰭隨動系統中應用

根據鰭角與鰭角反饋電壓的比例關系圖,將輸入幅值在±0.9V之間變化的正弦信號作為指令信號,使減搖鰭在指令信號的控制下,在±10°之間來回擺動。保持指令信號的幅值不變,改變信號的頻率,得到被控系統相應的幅值和相角。根據實驗數據可以得到隨動系統的幅頻特性和相頻特性,分別如圖5和圖6所示。需要注意的是,系統頻率特性圖中的橫坐標不是通常使用的對數分度lgω,而是直接使用ω。
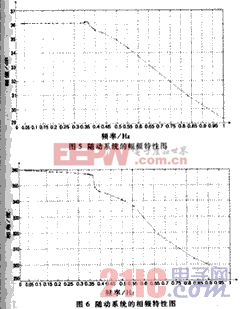
觀察隨動系統的幅頻特性圖可以看出,系統在頻率小于0.35Hz之前表現出了類似放大環節的特性,且此時系統的輸出幾乎沒有任何明顯變化,與角頻率變化無關,非常準確地實現了指令信號的輸出,系統非常穩定。從0.35Hz開始,隨著頻率的增大,系統的幅頻特性和相頻特性均發生了改變。從整個變化過程來看,系統表現出類似慣性環節的特性,因此可以將ω=0.35Hz近似地認為是系統的轉折頻率或交接頻率。
與幅頻特性相同,隨動系統的相頻特性圖也顯示出系統在ω=0.35Hz之前的相角滯后非常小,在5°以內,可以忽略不計。在0.35Hz之后相角發生了明顯的變化,整個變化趨勢也類似于一個慣性環節。但與典型的慣性環節不同,在所認為的轉折頻率ω=0.35Hz處,系統的相角沒有滯后45°左右,系統也沒有象典型慣性環節一樣相移-arctgTω,與角頻率ω表現出嚴格的反正切關系。
從整個系統表現出的幅頻特性和相頻特性來看,改造后的隨動系統可以近似地認為是由一個放大環節與慣性環節串聯組成,系統在頻率小于0.35Hz的低頻段表現出了較好的性能,符合減搖鰭系統對隨動系統的要求,可以很好地工作。
由于PLC在軟件和硬件上具有突出的優點,隨動系統的穩定性和精度都有所提高,系統的安裝和修改也更為簡單方便。經過運行測試,改造后的隨動系統符合設計要求,能夠穩定運行,確保了船舶減搖鰭系統的正常工作。隨動系統的改造完成后,將利用可編程控制器繼續完成減搖鰭控制器的設計,從而形成一套完整的應用可編程控制器實現的船舶減搖控制系統。
傾角傳感器相關文章:傾角傳感器原理







評論