自適應動態尋優控制系統仿真研究

設系統的輸出如圖2所示,把每個步進周期分成相等的2N等份,在每個分劃點進行采樣并取2N+1個采樣值,預估比較點在試探步后的第一個采樣點上進行。本文引用地址:http://cqxgywz.com/article/192079.htm

圖2中:如果在t=n―l不加試探階躍信號時,△Z2N+1系統輸出的預估差值;在t=n一1加試探階躍信號時,△Z2N+1系統輸出的實際差值;在比較點上△Z2N+1是系統輸出的實際差值與預估差值的比較差值即:

根據式(3)可知極值調節控制對象的輸出采樣值△Z1,△Z2,…,△Z2N+1來判斷步進增量方向,步進方向的邏輯判別式為:
![]()
式中,sgn[△xn]指的是△x的符號。由式(4),(5)可以看出,步進方向的邏輯判別式與控制對象的慣性時間常數Tl,T2,…,TN無關。因此這些參數隨時間的緩慢變化并不能影響步進方向的邏輯判別式,換言之,式(4)與式(5)能自己適應對象參數的變化,因而稱作自適應為動態尋優算法。以這種算法為核心設計的極值調節控制系統,不僅能自動識別參數,還能自動適應這些參數的變化。因此只要知道極值調節控制對象線性部分的階數就能正確地進行動態尋優,在尋優的過程中,無論控制對象線性部分的參數變化與否都不會對尋優結果的正確性有任何影響。仿真研究的結果充分證明了這一點。
2 仿真研究
對于非線性極值特性,有:
![]()
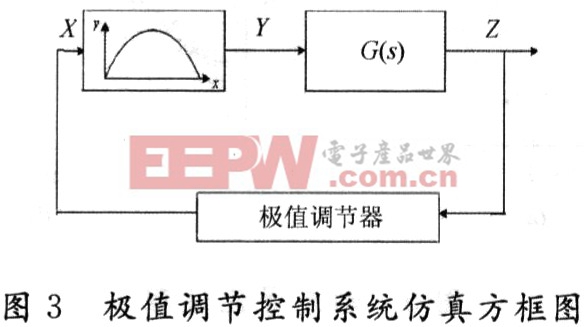
極值特性未飄移時,最初的極值點為(5,10),極值調節器由式(4)和式(5)實現。仿真程序框圖如圖4所示。









評論