感應電機SVPWM 控制系統的仿真研究

對不同扇區的T1、T2,按表1 所示取值,還要對其進行飽和判斷:如果T1+T2>Tpwm, 則T1= T1*Tpwm/(T1+ T2),T2= T2*Tpwm/(T1+ T2)。
2.2.2 判斷定子參考電壓矢量所在扇區
定義三個參考量Vref1 、Vref2 、Vref3 ,令Vref 1 =X;Vref 2 =.Z;Vref 3 =.Y 。
如果Vref1>0,則A=1,否則A=0;如果Vref2>0,則B=1,否則B =0;如果Vref3>0,則C=1,否則C =0。設N =A +2B +4C ,則N 與扇區數的對應關系如表2 所示。

2.2.3 確定比較器的切換點
定義:
經過上式計算就可得到SVPWM 的參考調制信號,最后根據扇區確定電壓空間矢量切換點Tcm1、Tcm2、Tcm3,如表3 所示。
3 電流注入型感應電機矢量控制方案
電流注入型矢量控制方案適用于中小功率、高開關頻率的矢量控制系統。此時控制系統的定子參考電壓完全可以由定子電流控制器提供,而無需考慮電機的定子電壓方程。逆變器開關頻率較高,而且電流控制器魯棒性足夠強,控制系統可以實現快速的定子電流控制,其實現方案如圖3 所示。同時,這種控制技術采用空間矢量PWM 技術輸出參考電壓,所以它能獲得很好的電流頻譜。
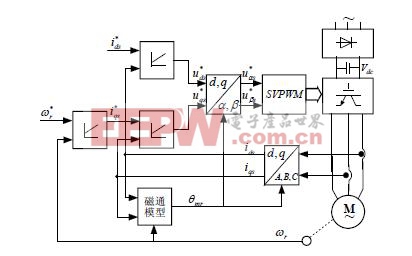
圖3 間接轉子磁場定向電流注入型感應電機矢量控制方案
由于電機是星形接法,無零序電流分量,所以該控制系統只需要測量電機的兩相電流,第三相電流可以通過方程iCs=-iAs-iBs 求出。此外,控制系統還需要測量電機的轉速,用于實現轉速閉環控制和計算轉子磁鏈位置角。控制系統總共包含轉速控制器、勵磁電流控制器和轉矩電流控制器等三個控制器,通常情況下,這三個控制器可以是PID 控制器[5]。
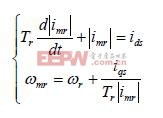
轉子磁場定向坐標系下的磁通模型如下式所示,可以看出,電機的勵磁電流分量imr 只與定子電流d 軸分量ids 有關,而不受定子電流q 軸分量iqs 的影響,說明在轉子磁場定向坐標系下,感應電機的勵磁電流分量和轉矩電流分量是完全解耦的[5]。

pid控制器相關文章:pid控制器原理












評論