數據采集系統設計

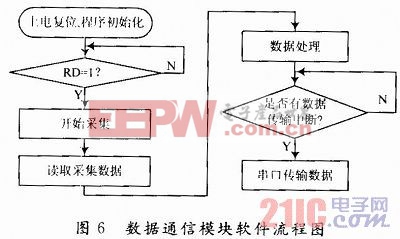
數據傳輸模塊軟件在Real View MDK環境下編寫,主要功能包括數據接收、數據處理、串口通信。STM32通過握手信號啟動CPLD的數據采集程序,在啟動A/D轉換器轉換下一路信號。軟件設計上,采用極值滑動平均濾波抑制疊加在模擬輸入信號上的噪聲;應用軟件攔截技術、軟件看門狗技術、故障處理自恢復技術等措施使受干擾而“跑飛”的程序回到正常的軌道上;采用I/O自檢等程序預先發現故障并定位故障所在,提高系統的可靠性。數據通信模塊軟件流程圖如圖6所示。
3.2上位機監控軟件設計
用戶應用服務程序直接面向用戶,是控制數據采集軟件的最上層,不僅提供與用戶交互的界面,還能通過發送各種控制命令來控制采集模塊的丁作。利用微軟公司開發的軟件開發平臺VC++6.0沒計上層界面,進行數據的實時顯示、存儲。采用串口傳輸協議,將底層采集到的數據傳輸到上位PC機,并在VC++6.0設計的上層界面中實時顯示。
制定通信協議:通信雙方的波特率設定為9 600 b/s;幀格式:一個起始位,八個數據位,一個可編程的第九位,一個停止位;工作方式:PC機采用查詢方式,STM32采用中斷方式;功能標志:發送請求標志#0F1H,接收請求標志#0FFH;校驗:通信雙方采用求和校驗的方式,即發送一串字符,雙方計算累加和,與PC機比較,有錯即重發。
4 結論
數據采集系統采用CPLD選取輸入通道、控制A/D轉換,實現數據采樣;利用STM32具有的豐富外設接口進行數據處理、數據通信,提高了系統設計的靈活性,使系統易于升級和擴展。本系統開發周期短、運行穩定、性能可靠、使用方便。配合上位機采集界面,方便進行操作使用以及各種采樣數據的存儲,在多種模擬量輸入的數據采集和控制系統的應用中前景十分廣闊,將數據采集系統應用到工業現場數據的采集中將是本研究下一步將要進行的工作。











評論