一、模塊簡介: 該超聲波測距模塊采用STC11F04E單片機作處理器,工作電源:DC5V,工作電流20mA。測量數據輸出方式為RS485輸出,數據格式為標準的ASCII碼,數據由:空格位(起始位)+百+十位+個位。工作方式有兩種:一是連續測量方式;二是查詢測量方式。
本文引用地址:http://cqxgywz.com/article/201611/321458.htm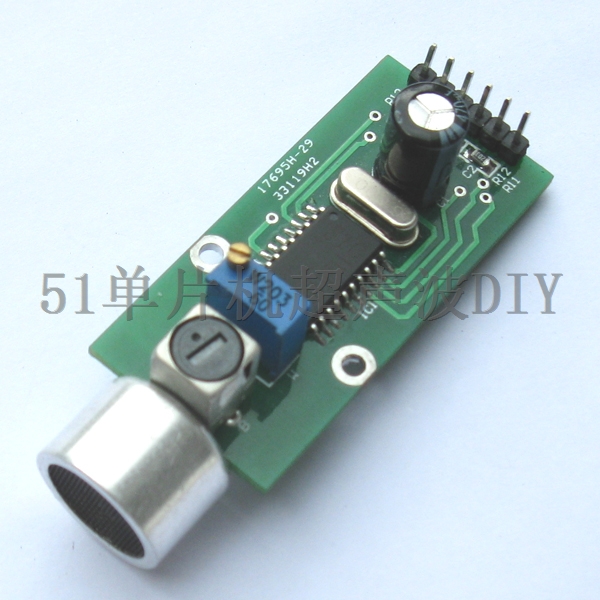
測量范圍:36cm~450cm(盲區36cm)。
測量過程中,當接收不到障礙物反射的回波時,輸出“C C C”, 當測量低于下限值(在盲區內)時顯示“- - -”。測量結果由模塊上的輸出端口輸出,輸出方式為RS485輸出。測量結果可通過電腦進行顯示。模塊使用RS485接口通訊,測量結果傳送距離遠,可以通過電腦采集數據,編寫通訊程序非常的便捷。
波特率:1200
校驗位:無
數據位:8
停止位:無
ASCII碼數據格式:空格位(起始位)+百+十位+個位。
二、模塊的使用設置
超聲波模塊的工作方式可進行設置,設置結果可保存在模塊內部的單片機中,斷電不會丟失。設置命令格式如下:

查詢命令格式:AT+CL=1-32(0-32為模的的地址編碼,每個模塊的地址可進行獨立設定,設定時使用AT+WD=“ ”命令,各塊模塊的編碼可獨立,由使用者自己設定,設定范圍0-32,只在查詢方式下有效),數據格式為16進制數據。
三、模塊使用
為減小本超聲波測距模塊外形尺寸,該超聲波測距元件采用雙面安裝,模塊長6.2cm寬2.4cm。模塊可用作應用系統的測距模塊。可應用在液位檢測、車位檢測、距離測量等產品中。板上留有安裝孔,有一排6腳插針。測試顯示程序范例如下:
#include //頭文件
#include //頭文件
#define uchar unsigned char //定義變量類型為字符型
#define uint unsigned int //定義變量類型為長整型
#define LED P0 //數碼管段碼輸出端
#define LED1 P2_6 //數碼管位1
#define LED2 P2_4 //數碼管位2
#define LED3 P2_5 //數碼管位3
#define sx P2_3 //數碼管位3
uchar s,i,pd,jsh,ml[3]={0,0,0},zj,xm0,xm1,xm2,xm3,buffer[3];//程序中用到的變量
uchar convert[10]={0xA0,0xBD,0x64,0x34,0x39,0x32,0x22,0xBC,0x20,0x30};////0~9段碼單片機端口P0x.0-P0.7 分別接數碼管的A、B、F、D、E、H、C、G各段
void delay(i);//延時函數
void scanLED();//顯示函數
void timeToBuffer();//顯示轉換函數
void offmsd();//百位數為0判斷處理模塊
void main()//主程序
{
EA=1;//開總中斷
ES=1;//串口中斷允許
SCON = 0x50; //串口方式1,允許接收
TMOD = 0x21; //定時器1定時方式2
TCON = 0x40; //定時器1開始計數
TH1 = 0xF3;//6MHz 1200波特率
TL1 = 0xF3;//6MHz 1200波特率
TI = 0;//串口發送中斷標志置0
RI =0;//串口接收中斷標志置0
TR1=1; //啟動定時器1
sx=0;
while(1)
{
timeToBuffer();//調用轉換段碼功能模塊
offmsd();//調用百位數為0判斷處理模塊
scanLED();//調用顯示函數
}
}
void delay(i)//延時子程序
{
while(--i);//延時循環
}
void scanLED() //顯示功能模塊
{
LED=buffer[0];//顯示個位數值,個數位數的段碼送顯示端口
LED3=0;//個位數位碼,低電平有效,進行顯示
delay(1);//顯示延時,加大該值,顯示亮度提高
LED3=1;//關閉顯示個位數顯示
delay(20);//關閉顯示延時,減小該值時顯示亮度提高
LED=buffer[1];//顯示十位數值,十數位數的段碼送顯示端口
LED2=0;//十位數位碼,低電平有效,進行顯示
delay(1);//顯示延時,加大該值,顯示亮度提高
LED2=1;//關閉顯示十位數顯示
delay(20);//關閉顯示延時,減小該值時顯示亮度提高
LED=buffer[2];//顯示百位數值,百數位數的段碼送顯示端口
LED1=0;//百位數位碼,低電平有效,進行顯示
delay(1);//顯示延時,加大該值,顯示亮度提高
LED1=1;//關閉顯示百位數顯示
delay(20); //關閉顯示延時,減小該值時顯示亮度提高
}
void offmsd()//百位數為0判斷處理模塊
{
if (buffer[2]==0xA0) //如果值為零時百位不顯示
buffer[2] = 0xff;//數碼管百位數的段碼全部為1,即高電平,百位不顯示
}
void serial() interrupt 4 using 3//串口中斷接收程序
{
if(RI)//串口接收到數據時串口中斷標志位為1
{
RI=0; //串口中斷標志位置0
pd=SBUF;//接收到的數據送中間變變量pd儲存
if(pd==0x20)//判斷接收到的數據是否為0x20(這是ASCII碼的空格的代碼)
{
jsh=0;//接收位數計數器jsh置0
pd=0;//中間變變量pd清0
}
if(jsh==1)//當jsh值為1時,代表串口接收到模塊發送回的百位數值
{
ml[0]=SBUF;//串口接收到模塊發送回的百位數值存入ml[0]單元
}
else if(jsh==2)//當jsh值為2時,代表串口接收到模塊發送回的十位數值
{
ml[1]=SBUF;//串口接收到模塊發送回的十位數值存入ml[1]單元
}
else if(jsh==3)//當jsh值為3時,代表串口接收到模塊發送回的個位數值
{
ml[2]=SBUF;//串口接收到模塊發送回的個位數值存入ml[2]單元
s=ml[0]*100+ml[1]*10+ml[2]; //計算測量得到的距離值s,單位為厘米
}
jsh++; //接收位數計數器值加1
}
}
void timeToBuffer() //轉換段碼功能模塊
{
xm0=ml[0]-48;//接到的值為標準的ASCII碼,進行十進制轉換,百位數的值
xm1=ml[1]-48;//接到的值為標準的ASCII碼,進行十進制轉換,十位數值
xm2=ml[2]-48;//接到的值為標準的ASCII碼,進行十進制轉換,個位數值
buffer[0]=convert[xm2];//轉換成對應的顯示碼段
buffer[1]=convert[xm1];//轉換成對應的顯示碼段
buffer[2]=convert[xm0];//轉換成對應的顯示碼段
if ((ml[0]==67)&&(ml[1]==67))//判斷接收到的ASCII碼數值為"C",表示模塊接收不到回波,這時的顯示用"C C C"表示
{
buffer[0]=0xE2;//顯示"C"的段碼是0xE2
buffer[1]=0xE2;//顯示"C"的段碼是0xE2
buffer[2]=0xE2; //顯示"C"的段碼是0xE2
}
else if ((ml[0]==45)&&(ml[1]==45))//判斷接收到的ASCII碼數值為"-",表示模塊的測量范圍在盲區范圍內這時的顯示用"- - -"表示
{
buffer[0]=0x7F;//顯示"-"的段碼是0x7F
buffer[1]=0x7F;//顯示"-"的段碼是0x7F
buffer[2]=0x7F; //顯示"-"的段碼是0x7F
}
}


評論