采用LM239雷達錐掃基準信號采集電路設計

LM239應用電路——雷達錐掃基準信號采集電路
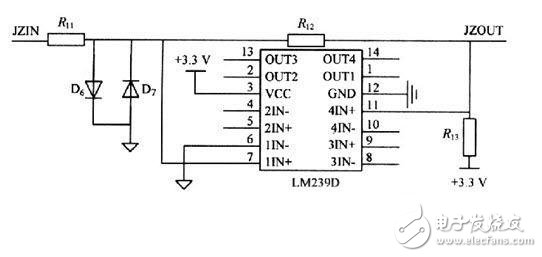
雷達在實際工作過程中,可能在任意時刻接收到目標回波。因此,若要模擬雷達復合差信號△,必須要確定每一個回波相對于錐掃基準信號的相位。通過設計錐掃基準信號采集電路取出耦合環的相位零時刻,依此來確定每一個回波相對于錐掃基準信號的相位。錐掃基準信號采集電路原理圖如圖所示。電路選用電壓比較器芯片LM239D,3.3 V電源供電,采用二極管對輸入錐掃基準信號限幅整形。電路的輸出為3.3 V方波信號,周期與輸入信號相同,認為方波上升沿為錐掃基準信號的相位零點。錐掃基準信號采集電路輸出的方波信號接入到控制主板定時器0,將其設置為輸入管腳,使用其脈寬計數及捕獲模式對方波信號進行計數。

評論