基于ARM的漿果采摘機械手運動控制研究

本控制系統采用ARM(Advanced RISC Machine)微處理器,其與單片機和DSP等相比具有很強的通用性,以其高速度、高性價比和低功耗等優點被廣泛應用于各個領域。
1 控制系統功能要求
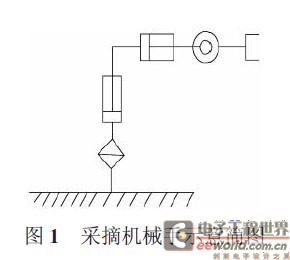
漿果采摘機器人的主要執行部分———機械手分為手臂和手腕兩部分。機械手如何躲避障礙物并能準確到達果實目標的位置是由機械手的自由度決定的,通常機械手在空間的位置和運動范圍主要取決于手臂部分的自由度,為了使機械手能夠到達空間的任一指定位置,其手臂部分至少應具有3 個自由度。手腕部分自由度主要是用來調整末端執行器在空間的姿態,為了使末端執行器在空間也能取得任意要求的姿態,在理論上要求手腕部分也應具有3 個自由度。其示意簡圖如圖1 所示。
控制系統的任務是從上位機接受指令,驅動各自由度所對應的電機,從而使采摘機械手到達指定位置進行作業。
2 控制系統硬件設計
機器人控制系統一般需要滿足以下幾個基本要求。
①控制系統的小型化、輕型化和模塊化;
②控制系統的實時性;
③系統的穩定性和開放性。
為此將本控制系統設計成由主控制模塊、驅動模塊和反饋模塊三部分組成,如圖2 所示。

評論