采用STC89C52單片機水陸兩棲救災車系統電路模塊設計

聲音模塊
本文引用地址:http://cqxgywz.com/article/201612/326510.htm本文的聲音模塊主要利用震動的規律來設計,其模塊電路圖如圖2所示。
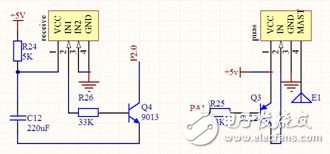
圖2 聲音模塊電路圖
驅動模塊
直流電機在調速方面具有廣泛的應用。因其過載能力強,范圍廣,調速便利,能快速實現啟動、反轉和制動。因此,選用L293D這個芯片放在電機驅動上,該芯片由TTL電平操控,因而操作簡便。有兩種方法可供選擇:
方法一:通過舵機來控制小車的轉向,用直流電機進行驅動控制。舵機控制轉向時,無法控制前進,倘若保證轉彎的同時前進,那么它必須有大功率支持,因而電源的要求較高。此外,舵機的轉向既平緩又靈活,但轉向弧度較大,以致于無法原地轉向,費用很高。
方法二:選擇雙直流電機來控制驅動和轉向,它的動力很強勁。通過電機差速的原理來控制轉向的問題,較易達到沿任意角度進行轉向的功能,因此選取方法二。電機控制的原理圖如圖4所示。
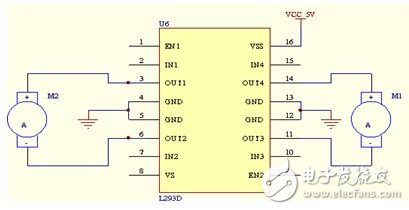
圖4 電機控制原理圖
本文提出并設計了一種水陸兩棲的救災車,結合氣墊船與輪式車輛,選擇STC89C52單片機,通過紅外避障技術的相關知識,在路況不好,車胎打滑、懸空等條件下,能夠實現自救,這樣之后實現了水陸兩棲的救災車的設計,可以自動實時監測,從而保證及時救災,進而保障了人們的財產以及生命安全。

評論