CAN-FD總線協議及其車載網絡應用簡介

CAN及CAN-FD背景介紹
本文引用地址:http://cqxgywz.com/article/201612/329870.htm自1986年博世(Bosch)首次在SAE國際大會上展示CAN(Controller Area Network,控制器域網絡)通信方案以來,這種高速、可靠、易用的通信總線就一直被汽車產業所關注,并得到了絕大多數整車廠和零部件廠的支持。經過了20多年的發展與沉淀,CAN通信目前已經成為車載網絡領域最成熟、應用最廣泛的通信總線之一(CAN的發展歷程如圖1所示)。
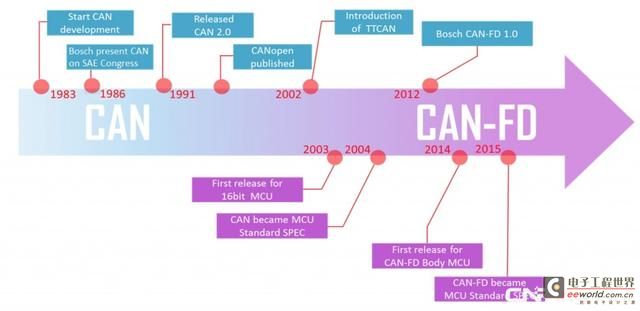
圖1 CAN通信方案的發展歷程
CAN總線通信的一些關鍵特性使其非常適合車載網絡應用:
(1)差分信號可靠性高,抗干擾能力強,且通信介質選擇靈活(雙絞線、同軸電纜或光纖);
(2)通信速率最高可達1 Mbit/s(此時距離最長40 m);
(3)采用多主通信模式,當總線空閑時,任意節點均可以主動向網絡其他節點發送信息;
(4)支持節點優先級設定,并采用非破壞性逐位仲裁規則解決潛在數據發送沖突;
(5)信息以廣播式發送,所有節點都能接收到信息,保證網絡內的數據一致性;
(6)支持完善的錯誤界定和處理機制,出錯節點具有自動關閉退出總線的功能。
隨著人們對汽車的智能化要求越來越高,汽車上裝配的電子控制單元也越來越多,CAN總線通信也漸漸顯現出來一些不足:
(1)最高數據傳輸速率限制為1 Mbit/s,車載領域實際使用速率最高為500 Kbit/s,無法滿足越來越高的數據吞吐量需求;
(2)每幀報文有效數據場為8字節,僅占整幀報文信息不足50%;
(3)性能上難以應對Flexray、Ethernet等新型車載總線的威脅。
市場對提升CAN總線性能的強烈需求使CAN-FD (Flexible Data rate)應運而生,CAN-FD發揚了CAN的優點,并彌補了CAN的不足,其主要特性如下:
(1)采用與CAN通信相同的事件觸發模式,軟件容易開發和移植;
(2)最高數據傳輸速率達5Mbit/s,更好地滿足要求高實時性、高數據傳輸速率的應用;
(3)每幀報文有效數據場為64字節,占整幀報文信息超過70%;
(4)相比Flexray、Ethernet等新興總線成本更低。
CAN-FD的技術特點
CAN-FD通過改變幀結構和提高位速率等方法成功的把數據傳輸速率提高到了5Mbit/s,其基本原理如圖2所示。CAN-FD協議的幀結構如圖3所示。
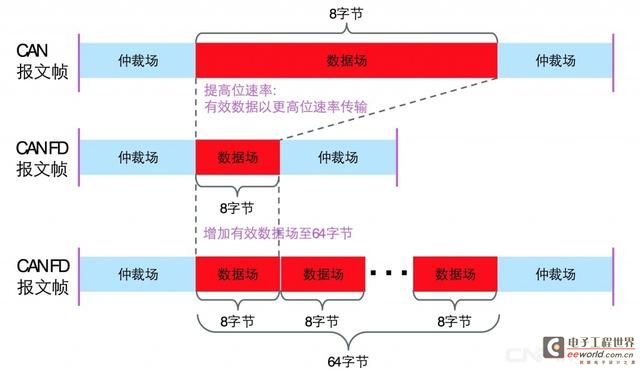
圖2 CAN-FD傳輸的基本原理
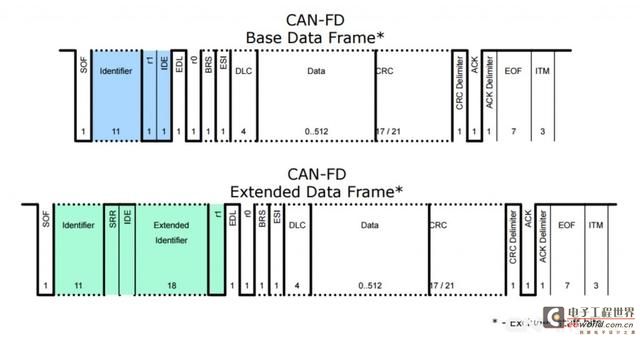
圖3 CAN-FD協議的幀結構 (注:圖片來源:Vector)
CAN與CAN-FD總線的區別:
CAN與CAN-FD總線報文格式對比:
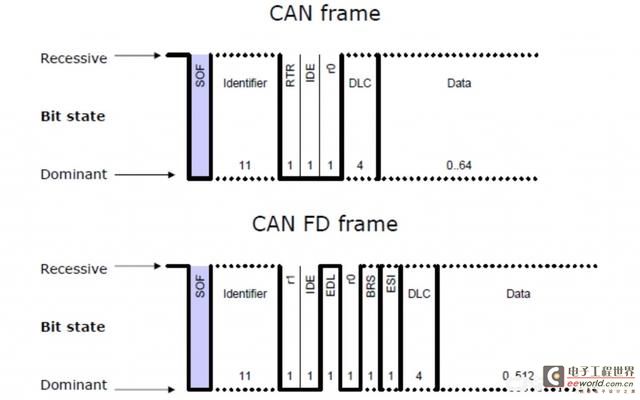
圖4 CAN與CAN-FD總線報文格式對比圖 (注:圖片來源:Vector)
CAN與CAN-FD總線的區別:
(1) CAN-FD整個報文幀包含兩種不同的數據傳輸速率,從SOF到BRS(Bit Rate Switch)采用傳統的50Kbps至1Mbps速率傳輸,從BRS到ACK場采用可變傳輸速率,通常為5Mbps;
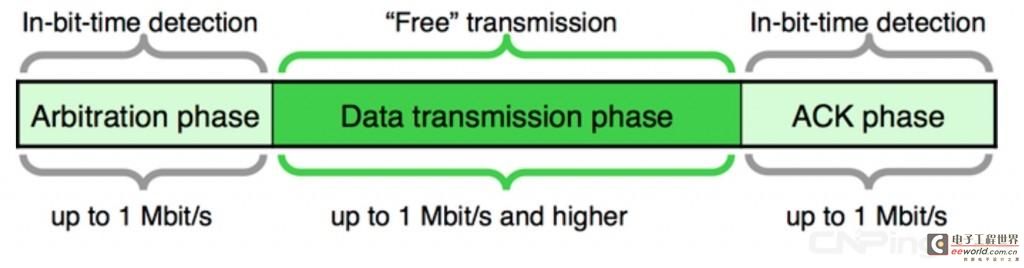
圖5 CAN-FD數據傳輸速率轉換 (注:圖片來源:http://www.can-cia.org/de/can-knowledge/can/can-fd/ )
(2)CAN-FD數據場有效字節數最高可達64字節;
(3)報文幀格式變化:
a) CAN-FD取消了RTR(Remote Transmission Request)位,代之以RRS(Remote Request Substitution)位,且RRS位一直為顯性位;
b) CAN-FD在控制場增加了以下控制位。FDF(FD Format)或EDL(Extended Data Length):CAN格式為顯性,CAN-FD格式為隱性;BRS(Bit Rate Switch):在CAN-FD報文中分隔仲裁場與數據場、轉換數據傳輸速率為隱性、不轉換數據傳輸速率為顯性;ESI(Error State Indicator):發送節點處于被動錯誤狀態(Error Passive)為隱性、發送節點處于主動錯誤狀態(Error Active)為顯性。
c) CAN-FD采用了新的DLC編碼方式,如下圖所示:
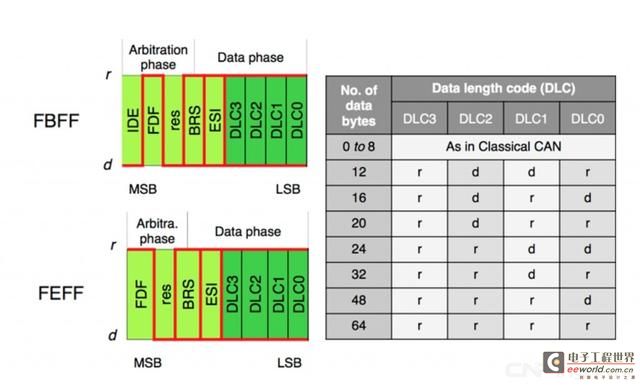
圖6 CAN-FD DLC編碼方式(注:圖片來源:http://www.can-cia.org/de/can-knowledge/can/can-fd/)
d) CAN-FD采用了新的CRC算法:標準CAN:CRC碼為15位
CAN-FD:數據場小于等于16字節,CRC碼為17位;數據場大于16字節,CRC碼為21位。
CAN與CAN-FD混合網絡的實施:
根據CAN與CAN-FD網關特性及網絡結構的不同,標準CAN與CAN-FD混合網絡的實施具有一定復雜性,需要根據具體情況進行實際論證。通常建議從以下幾個方面為基礎進行考量:
(1)網絡中存在單個CAN-FD節點:
CAN-FD節點的數據通信速率需要與網關的通信速率兼容,故采用與標準CAN網關相同的通信速率,通常為500Kbps;
(2)網絡中存在多個CAN-FD節點:
采用諸如局部網絡(Partial Network)的分組組網技術,實現在數據通信時局部網絡節點喚醒,即CAN-FD節點間通信時,標準CAN節點不喚醒;
CAN-FD的相關廠商:
(1)CAN-FD的IC廠商
a) MCU/SOC:目前汽車電子領域的各大半導體廠商已經量產或正在開發集成CAN-FD控制器的產品。
詩訊半導體(Spansion)近期發布的Cortex-R5系列汽車級MCU產品全系列支持CAN-FD總線通信。2014年7月,詩訊半導體正式發布了集成CAN-FD控制器的ARM Cortex-R5 S6J3310系列產品。該產品的關鍵特性包括:ARM Cortex-R5高性能32位內核,主頻高達144 MHz;最高集成2路CAN-FD通信,每路數據傳輸速率達5 Mbit/s;支持SHE(Secure Hardware Extension)加密功能;支持更新的低功耗功能,如部分喚醒等;支持AutoSAR。圖4展示了S6J3110評估板的CAN-FD的技術特點和幀結構的實測波形。
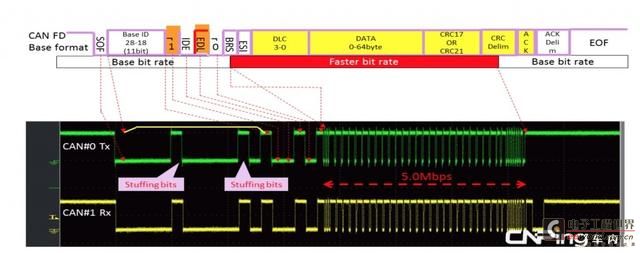
圖7 S6J3110評估板的CAN-FD的技術特點和幀結構的實測波形
b) 收發器:目前NXP為代表的收發器廠商已經有多款支持CAN-FD的產品推出,且部分產品已經支持局部網絡(Partial Network)、休眠狀態總線喚醒等功能。
(2)CAN-FD的設備、工具廠商
在車載應用領域,目前已有多家設備、工具廠商支持CAN-FD總線協議,如維克多(Vector)、羅德與施瓦茨(R&S)和周立功(ZLG)等。
國外廠商以維克多為代表,其在工具體系的完整性方面更為領先。Vector的工具體系完整的支持CAN-FD的開發、測試、網絡分析等全部功能。另外,其GL系列總線記錄儀也將在不遠的將來支持CAN-FD協議。
國內廠商以周立功為代表,其最新推出的四通道ZDS2024示波器可以很好的支持CAN-FD協議,其關鍵特性包括:支持4通道、模擬帶寬高達200MHz、采樣率每通道均為1GSa/s、21種協議觸發及解碼、51種參數測量及24種參數同時測量統計。
CAN-FD的主要應用領域:
CAN-FD因其繼承了CAN總線得低成本、高可靠性等特點,又進一步提升了其數據傳輸性能,未來在以下領域有著很大的發展空間:
(1)EOL(End-Of-Line)程序燒寫:CAN數據傳輸速率為500 Kbit/s;CAN-FD數據傳輸速率為5 Mbit/s,約10倍于CAN傳輸速率。
(2)動力、底盤和安全系統,以及身份認證:數據場支持長達64字節,避免數據非必要的拆分。
(3)網關:提高網絡數據傳輸速率達5 Mbit/s,提高了有效數據負載率。
車載電子模塊數量的不斷增長對車載網絡通信技術提出了更高的要求,CAN-FD作為一個新興的車載網絡技術具備低成本、高可靠性、高傳輸速率等優點,很有可能會在未來幾年的汽車電子領域大放異彩。
CAN及CAN-FD專業名詞:
d = dominant
r = recessive
ACK = acknowledgement
CRC = cyclic redundancy check
DLC = Data length code
EDL = Extended Data Length
EOF = End-Of-Frame
ESI = Error State Indicator
FBFF = FD Base Frame Format
FEFF = FD Extended Frame Format
FDF = flexible data rate format
IDE = identifier extension
IMF = intermission field
r0 = reserved
RTR = Remote transmission request
RRS = remote request substitution
SOF = start-of-frame
SRR = substitute remote request
BRS = Bit Rate Switch









評論