無刷直流電機控制器硬件設計和實現

3.2 PWM驅動試驗
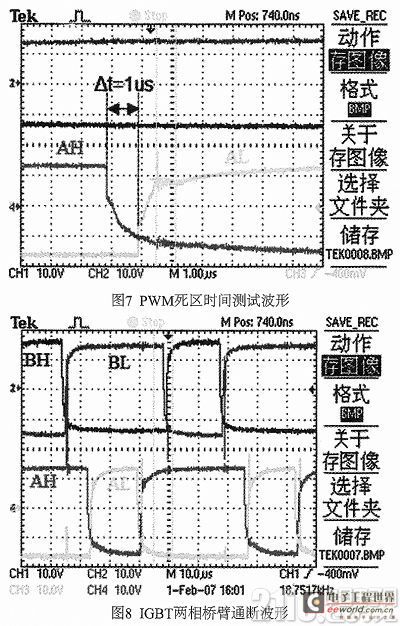
主控DSP輸出的PWM信號為控制系統中的關鍵控制信號之一,控制IPM中IGBT的導通和關斷,根據調壓調速的原理調節無刷電機轉速。 IPM上下橋臂IGBT采取互補模式工作,當上下橋臂IGBT的開關狀態發生翻轉時,為防止發生直通而導致短路,必須在PWM信號發生翻轉時設置死區時間;本文設定的死區時間為1μs,PWM死區時間測定波形如圖7所示。兩相上下橋臂IGBT開關控制波形如圖8所示,采用中心對稱模式的PWM控制,斬波頻率為15kHz時,電機繞組電壓通斷頻率為PWM斬波頻率的兩倍,即為30kHz,可有效減小無刷電機的轉矩脈動。
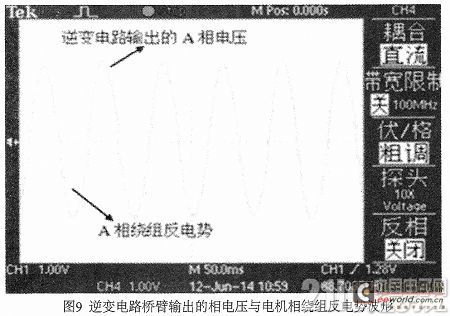
由于功率逆變電路采用三相全橋逆變拓撲結構,為保證電機出力最大,功率逆變電路橋臂輸出的電壓應與對應的無刷直流電機繞組反電動勢保持適當的相位關系。圖 9是對電機轉子位置信號值進行軟件調整后、功率逆變電路輸出的A相電壓與無刷直流電機A相繞組的反電勢波形,兩者過零點對齊,逆變電路橋臂輸出的電壓波形接近正弦波,滿足采用PWM方式驅動無刷直流電機的供電要求。
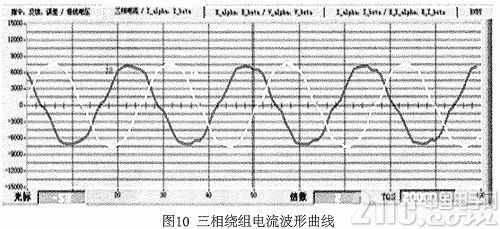
3.3 三相繞組電流測試
圖10為無刷電機正常運行過程中,上位機調試平臺觀測到的兩相繞組電流波形ia、ib(ic=-ia-ib為減少數據量,ic未進行顯示)。為方便調試,DSP定時將需要觀察的變量上傳到上位機調試平臺,調試平臺把上傳的數據繪制成曲線。圖中縱坐標為信號幅值對應的A/D轉換值,橫坐標為上傳點數。試驗表明電流采樣電路能夠真實的反映電機繞組實際電流值,硬件設計合理。
4 結論
本文是基于雙TMS320F2812 DSP處理器為核心,進行無刷直流電機控制器硬件設計,利用主控DSP進行系統實時控制、利用監控DSP對系統狀態進行全面監控,以提高系統運行可靠性。對核心硬件電路進行試驗,結果表明控制器硬件電路設計能夠為軟件設計提供可靠的平臺。





評論