伺服驅動器在工業機器人上的應用

如何減少機器人在運行過程中發生的振動,一直是機器人用伺服系統的一個難題,這也是很多國內伺服產品無法應用到工業機器人上的一個原因。
振動主要出現在兩種工況,一是機器人在啟動和停止時,機器人本體和末端會發生振動;一是機器人在高速運行,并移動范圍較大時,本體會出現振動和運行軌跡偏差較大的現象。引起振動的主要原因就是機器人各個關節的慣量發生了較大變化,要消除振動必須在伺服驅動器中加入各種前饋補償控制功能。
3.2系統方案設計
通過對客戶需求的深入分析,我們為客戶設計了“KEBA控制器+CoolDrive A8”伺服驅動器的電控系統解決方案。
1. 機器人專用控制系統
本次項目選擇的是KEBA專為機器人行業開發的KeMotion控制系統,包括控制器、視教盒以及控制軟件。其控制器和視教盒都支持EtherCAT高速工業以太網通訊,具有很高的計算性能和通訊速度。
KeMotion還提供了強大的機器人控制軟件,其中內置了多種類型的機器人路徑規劃模型,能夠快速完成機器人的開發;同時軟件還提供了豐富的補償算法和插補功能,保證了機器人的控制精度。
2. CoolDrive A8高性能伺服驅動器
CoolDrive A8是國內首家通過ETG一致性測試的產品,因此能夠很好同KEBA控制器進行配合;同時,CoolDrive A8內置的電流環、 速度環以及位置環的循環時間分別達到了62.5us、 125us和250us, 頻率響應更是高達3KHz,充分滿足工業機器人對動態響應和同步性的要求。
針對機器人的振動問題,CoolDrive A8加入了速度、加速度前饋補償,力矩補償等補償算法,并開發了定位抖動消除、慣量前饋等功能,較好的解決了機器人本體在高速運行、快速定位時產生的振動。除此之外, CoolDrive A8還增加了電機弱磁控制技術以實現機器人的輕載高速運行,增加編碼器信號修正技術以提高機器人的穩定性和降低運行中的噪音等。
CoolDrive A8還在國內伺服廠商中創新性的采用模塊化設計。整個系統由整流模塊和電機驅動模塊構成,通過直流母線連接。這樣的結構便于用戶進行系統擴展,而且連線非常簡單,直流母線還能提高系統的能源效率,使設備更加節能。CoolDrive A8還內置了STO、SS1、SS2等安全功能,在緊急情況下能夠按照事先預定的規則進行安全停車,保護設備及人員的安全。
4、機器人實際性能測試
在實際測試過程中,在沒有加入速度、加速度前饋補償,力矩補償等補償算法的情況下,機器人在滿載運行時,會發生明顯振動。在機器人啟動的瞬間,如果沒有提前給定力矩補償,機器人本體由于重力的作用會發生下沉的動作,也就是俗稱的“點頭”。而在機器人由高速運行狀態快速停止時,如果沒有“定位抖動消除”功能,機器人本體會由于慣性的突然變化而發生抖動。
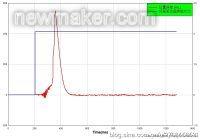
下圖是沒有開啟補償及振動抑制功能時,機器人的位置誤差,可以看到明顯的振動現象。

清能德創致力于為國內機器人整機廠商提供國產高端伺服系統,在性能和功能上能夠滿足機器人對伺服系統的要求,同時也沒有國外產品高昂的價格,從而實現機器人關鍵零部件的國產化,降低國內機器人整機廠商的總體成本,提高國產機器人的競爭力。(end)

評論