軟硬結合的智能視覺讓機器人行動更靈敏

機器人,這一長期出現在科幻世界和航運產品文檔中的事物,被描述為能夠幫助人類從呆板、單調和難以忍受的工作中釋放出來,并利用其高速度及高精度的特點提升工作效果。無論是可完成吸塵、地毯清洗,甚至排水溝的清潔工作的第一代自主消費機器人系統,或是多種類型的生產環境下機器人的使用正不斷增長,都可以說明上述觀點(圖1)。


圖1:為消費者量身定制的自主產品(a)和工業制造系統(b)是眾多可以通過視覺處理功能而得到增強的機器人中的一部分。
人類用眼睛(以及感覺)和大腦對其周圍的世界進行辨識和定位。從理論上講,采用攝像頭組件、視覺處理器和各種軟件算法的機器人系統也應該可以做到。但縱觀歷史,這樣的圖像分析技術通常只有在復雜并且昂貴的系統中才能找到。但數字集成電路在成本、性能和功耗方面的進步,為視覺功能使用在多樣化和高容量的應用上鋪平了道路,其中包括機器人實現的功能越來越多。雖然機器人在功能實現方面仍然面臨著諸多挑戰,但與以往相比,今天已經可以更加輕松、快速、經濟高效地解決這些問題。
軟件技術
開發出可根據視覺適應其環境的機器人系統需要采用電腦視覺算法,該算法可將一個或多個圖像傳感器中的數據轉換成該環境的可執行信息。機器人的兩個常見任務分別是識別外部目標和方向,并決定機器人的位置和方向。許多機器人可與一個或多個特定目標進行互動。對于情境自適應機器人而言,必須能夠檢測到那些在未知地點和方向的目標,并且還要了解到這些目標很可能會移動。
攝像頭每秒產生上百萬像素的數據,從而形成了一個肩負著沉重處理負擔的有效載荷。解決該問題的一種常見方法是檢測這些多像素的特征,如視頻數據每一幀的角、點、邊或線(圖2)。
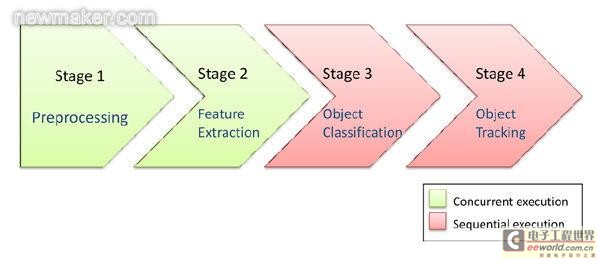
圖2:完整處理二維或三維機器人視覺傳感器的原始輸出涉及四個主要階段,
每個階段都有自己的獨特性并受其處理要求的制約。

圖3:視覺處理器可以集成多種類型的內核,以滿足每個處理階段的獨特需求。
通過特征來確定目標方位需要一種像RANSAC (隨機抽樣和均測)那樣的基于統計的算法。該算法采用一組特征來模擬一個潛在的目標方向,然后確定多少其他特征適合該模型。具有最大數量匹配特征的模型對應于被正確識別的目標方向。為了檢測移動目標,用戶可以將特征識別與跟蹤算法相結合。一旦一組特征正確地識別了一個目標, KLT(Kanade-Lucas-Tomasi)或卡爾曼濾波等算法將在視頻的幀之間跟蹤這些特征的運動軌跡。無論方向和阻塞如何改變,這些技術都是非常可靠的,因為他們僅需要跟蹤一組最初特征便可成功。

評論