基于OSEK/VDX的電動助力轉向系統設計

3.2 任務優先級
PICOS18采用占先式調度方式,即所有任務都是可占先的,每個任務都有一個確定的唯一的優先級,任務越重要優先級越高。由于助力控制(Task6)任務必須在合適的時刻運行,所以Task6優先級最高,回正控制(Task7)、阻尼控制(Task8)次之,其次是故障診斷任務(Task4),其余任務優先級按其激活的執行順序確定。Task4在開始運行時處于等待狀態如未監測到不正常信號則不再執行。Task1、Task2和Task5在按順序執行完一個循環后,繼續響應轉速中斷,重新執行。這種調度方式不僅能采集到最新的車速信號和扭矩信號,使EPS系統實時準確地提供助力,還能提高CPU利用率,充分利用硬件資源。
3.3 任務配置(OIL)
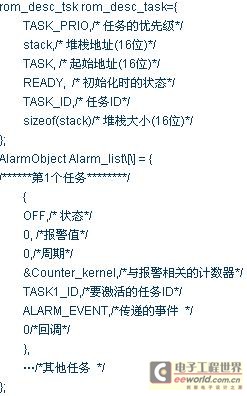
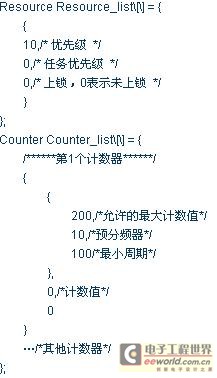
PICOS18通過taskdesc.c定義任務的各個參數,并且是用OSEK/VDX規范中的OIL(OSEK/VDX的實現語言,類似于一個C結構定義)編寫的[5]。由于PICOS18沒有提供GUI用于任務的配置,因此只能逐句編寫。任務的參數定義結構如下:
4 結論
本文分析了EPS系統的結構、工作原理和3種控制方式。通過PIC18F458單片機的ECCP模塊控制電機,實現了EPS系統在各種情況下的助力方式。采用嵌入式實時操作系統,不僅提高了CPU的利用率,確保了EPS系統的實時性要求,還提高了系統運行的穩定性、可靠性以及移植性。
OSEK/VDX是汽車電子開發的國際性標準,采用OSEK/VDX規范開發的實時系統能夠提高軟件模塊的移植效率、實現軟件模塊的重復利用及在不同電子控制單元之間的通信。采用OSEK/VDX進行汽車電控單元開發已成為發展趨勢。
參考文獻
[1] 胡建軍,李彤,龔為倫,等.汽車轉向技術進展分析[J].液壓與氣動,2006(12):17-20.
[2] 陳卓,熊忠陽,李銀國.基于OSEK/VDX操作系統的任務管理機制設計[J].計算機工程.2006,12(36):82-84.
[3] 羅玉濤.現代汽車電子控制技術[M].北京:國防工業出版社,2006:174-202.
[4] 龔黎明,辜承林.基于OSEK/VDX標準的嵌入式實時操作系統PICOS18[J].電子技術. 2004(5):10-13.
[5] OSEK/VDX.OSEK Implementation Language Version 2.5. 2004[OL].http://www.osekvdx.org.

評論